

Series reconfigurable variable-stiffness robot joint structure based on permanent magnet spring
A technology of robot joints and permanent magnet springs, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as insufficient load capacity of variable stiffness joints, complex structure of variable stiffness devices, and increased joint mass and inertia. Human-computer interaction safety, simple structure, and the effect of reducing joint energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
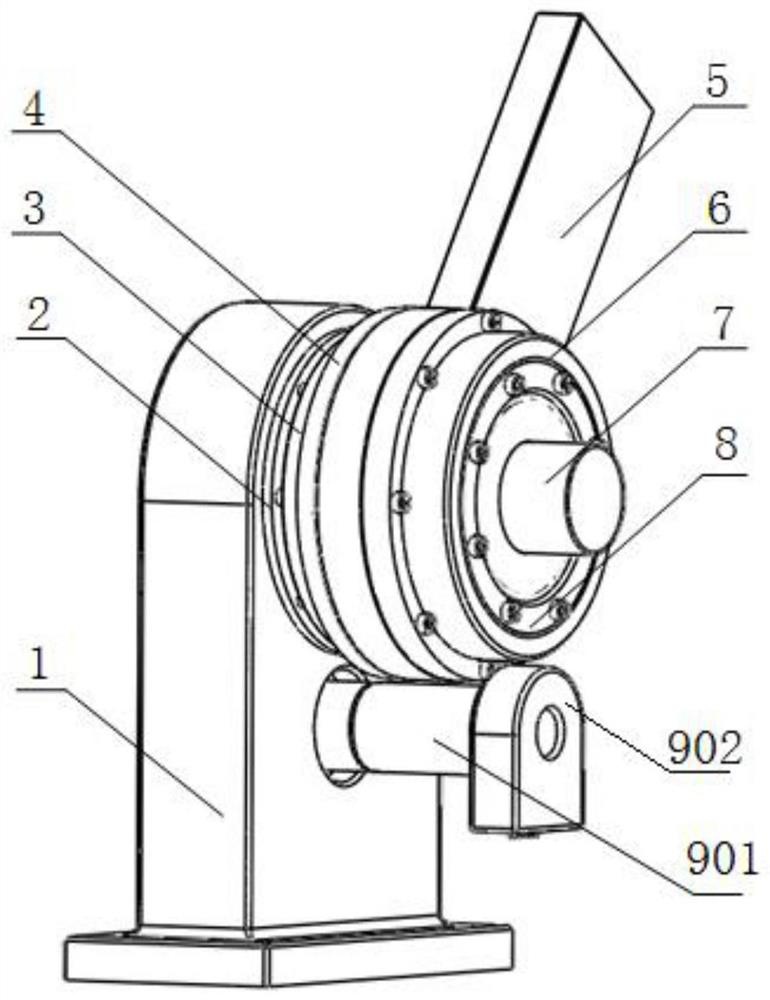
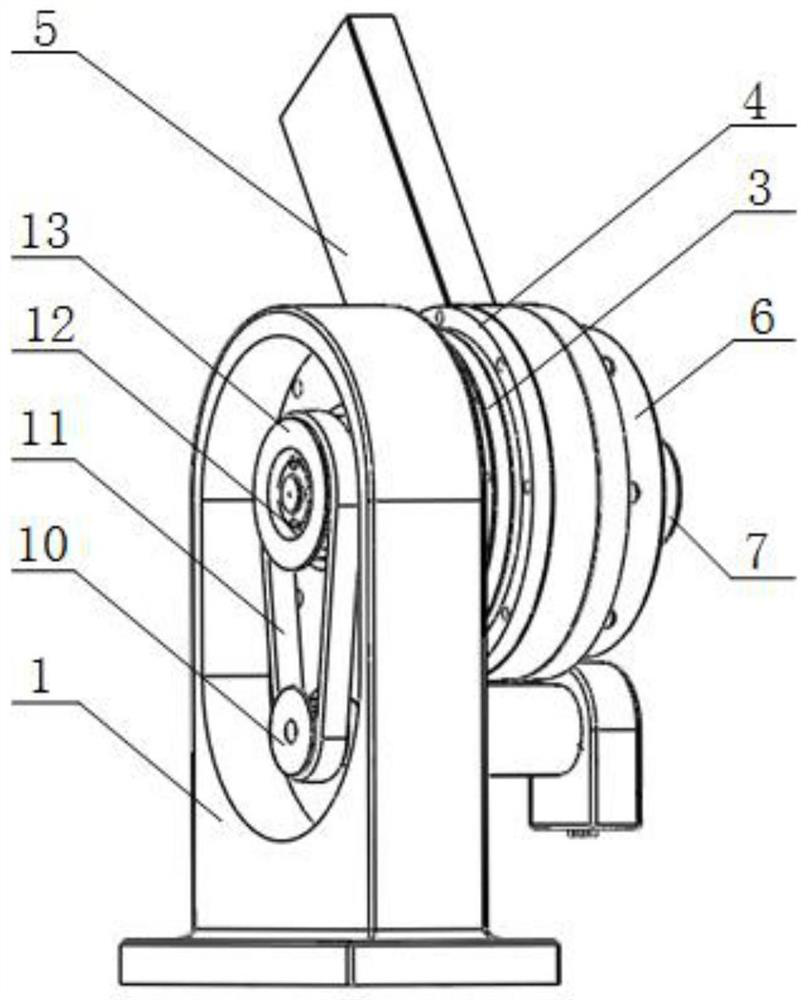
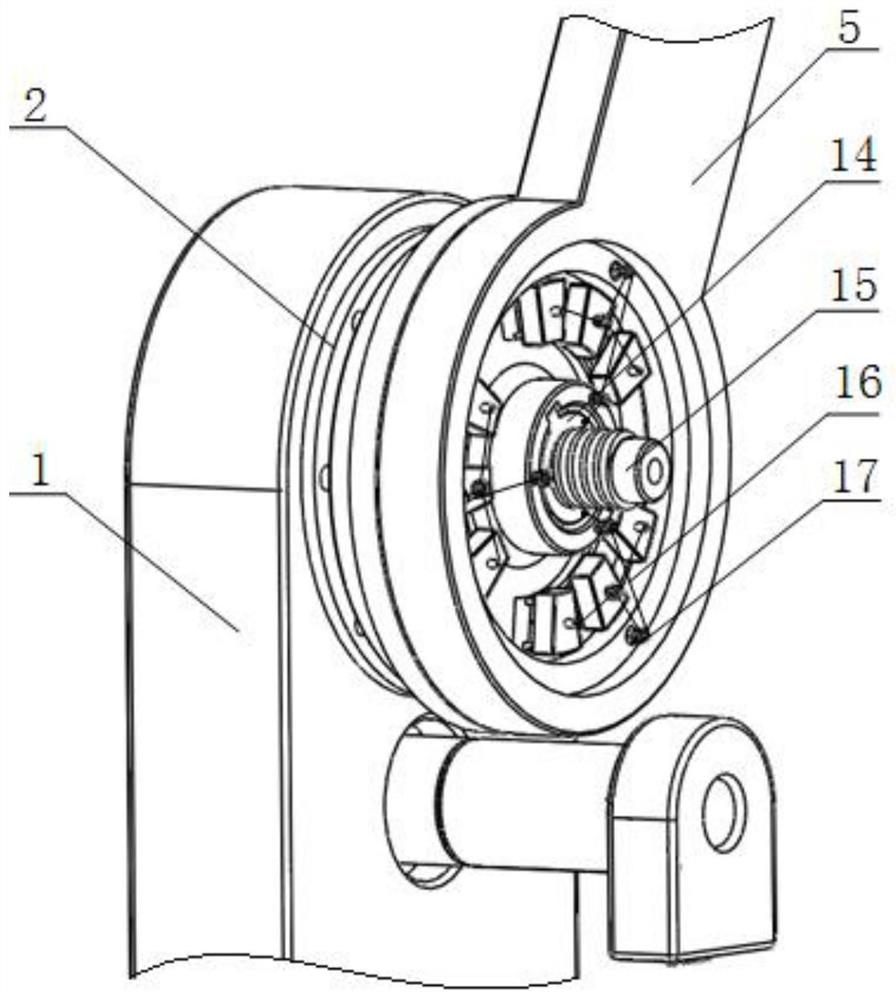
[0023] Such as Figure 1 to Figure 4 As shown, a series reconfigurable variable stiffness robot joint structure based on permanent magnet springs includes a base 1, a rope 16, and a variable stiffness motor 7; one end of the vertical base of the base 1 is processed into a waist-shaped blind hole, The other end is processed with an upper through hole and a lower through hole connected with the waist-shaped blind hole. In the lower through hole, a rotating shaft I is installed through a bearing. One end is fixedly installed on the upper surface of the base 1, and the other end is located in the waist-shaped blind hole, and a small pulley 10 is partially installed; the output disc 3 is a disc with a shaft body 12, and the upper through hole passes through the cross roller. The sub-bearing I2 is rotatably installed with the shaft body 12 of the o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More