

Flexible lower limb exoskeleton rehabilitation unit construction method based on digital twinning and system thereof
A construction method and exoskeleton technology, applied in the field of human-computer interaction medical treatment, to achieve the effects of low power consumption, convenient observation, light and comfortable wearing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be described in detail below with reference to the specific embodiments. The following examples will help to further understand the present invention in any form of technicrat, it will be further understood by those skilled in the art. It should be noted that several variations and improvements can be made without departing from the concept of the present invention without departing from the present invention. These are all of the scope of protection of the present invention.
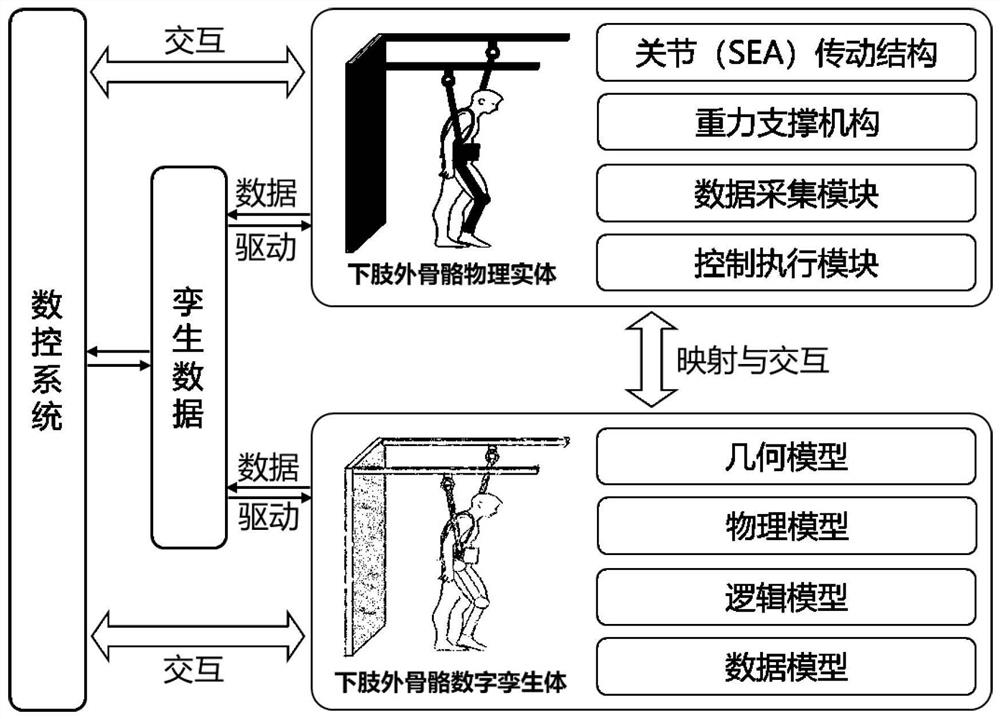
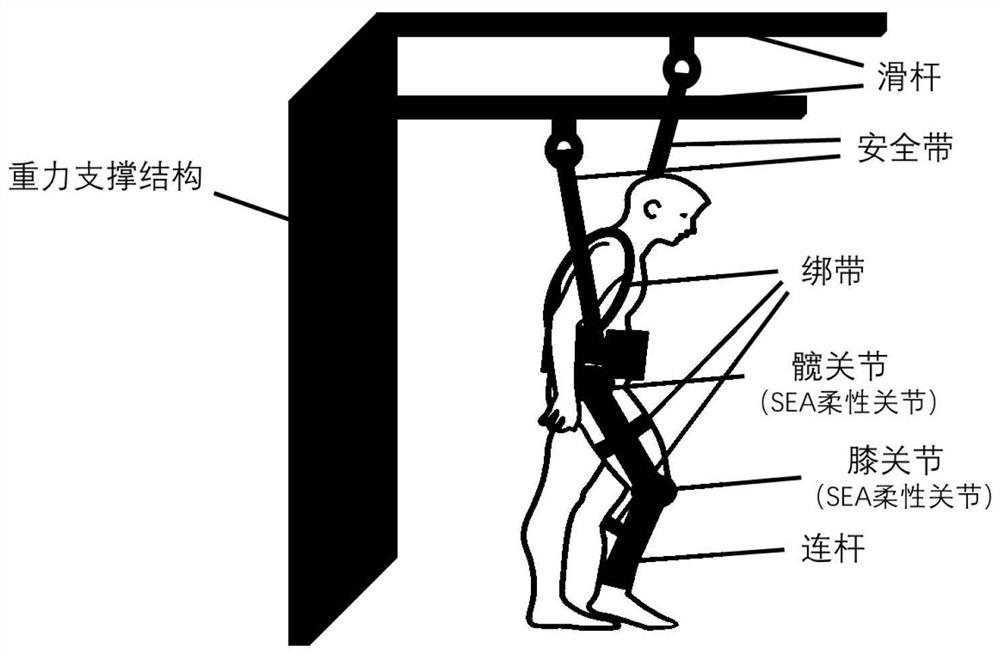
[0064] A flexible lower limb outer skeleton rehabilitation system based on digital twins, including:
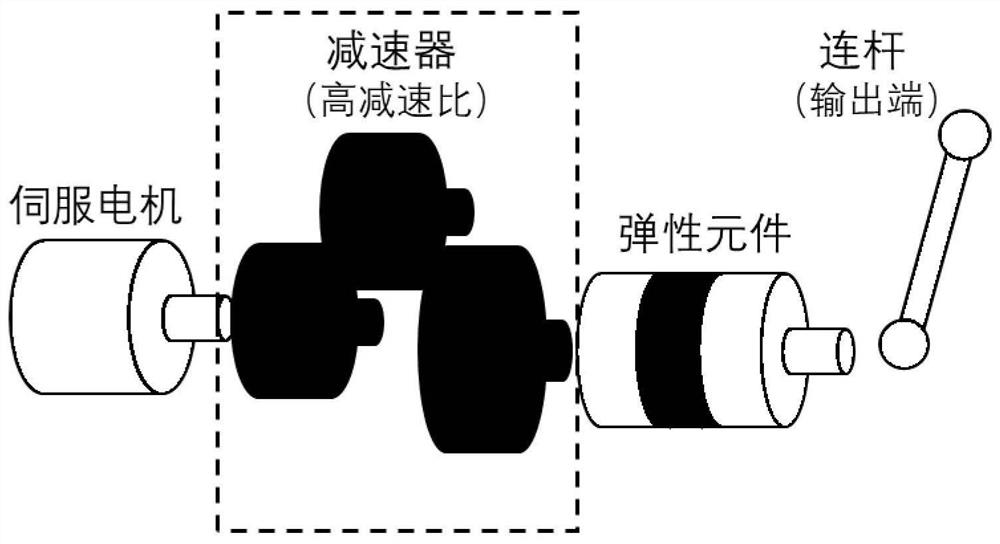
[0065] Lower extremity skeletal physical entity: external skeletal entity is fixed to the wearer in a rigid support and flexible drive organic binding, including various straps and various joint transmission structures, gravity support mechanisms, data acquisition modules and controls. Executive module; the strap requires that the joint transmission structure is not easy t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More