

Cooperative control method for multiple wheeled robots under DoS attack
A wheeled robot, collaborative control technology, applied in the field of control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
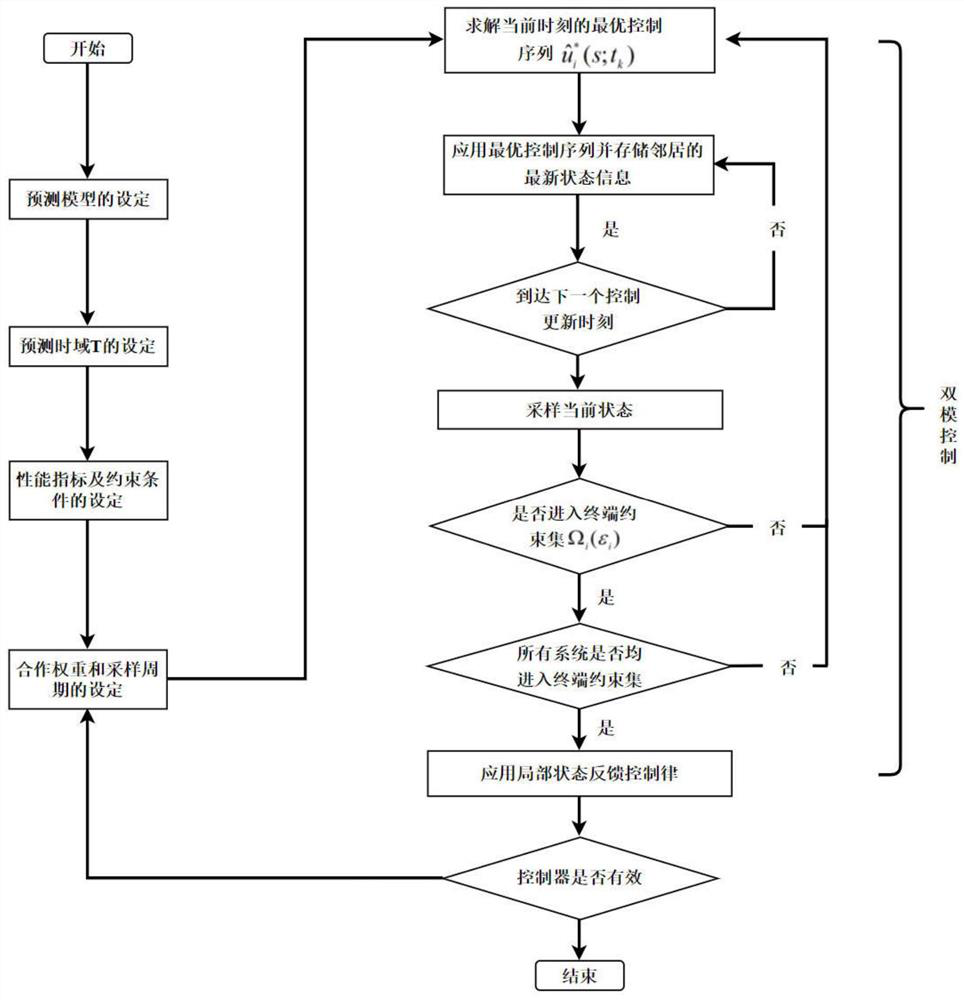
[0089] For the distributed model predictive control method for cooperative control of multiple wheeled robots under DoS attack, the method steps are implemented as follows:
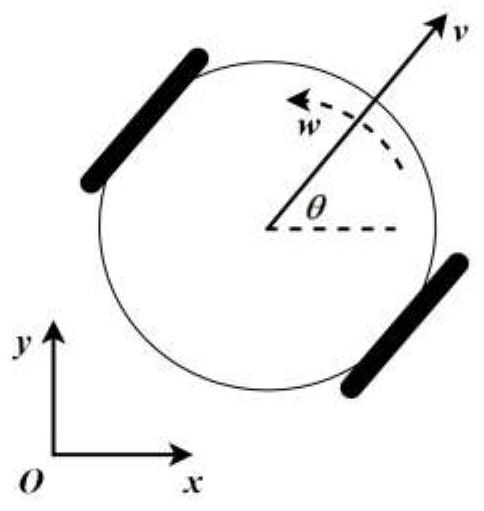
[0090] Step A: According to the kinematic model of the wheeled robot, a prediction model of a distributed system including four wheeled robots is established, and the specific implementation is as follows:
[0091]
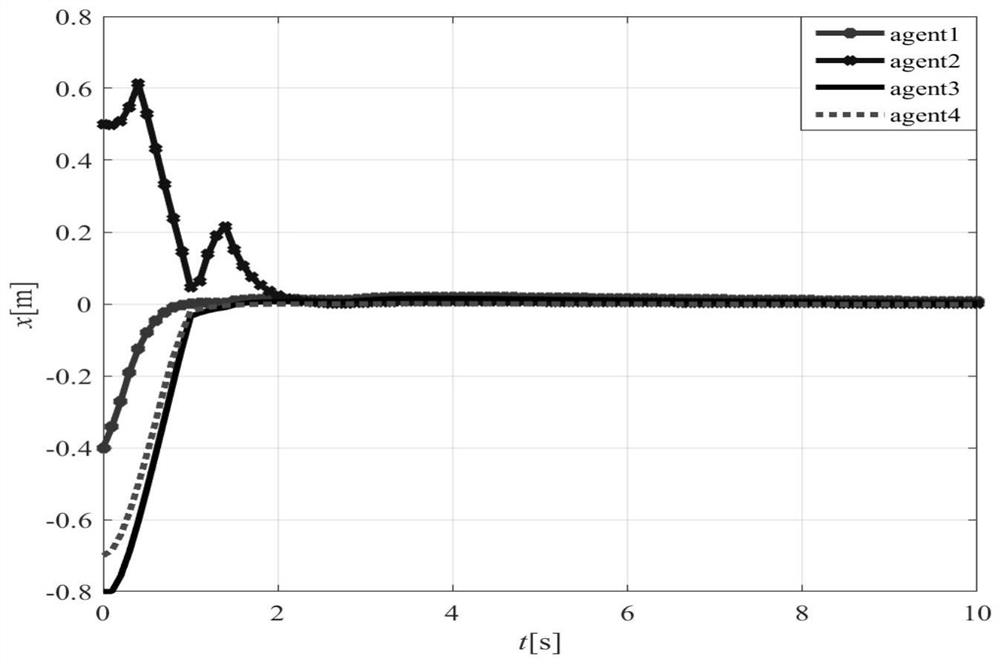
[0092] Step B: Set the prediction time domain T=2s, and set the linear velocity of the control input constraint to -1m / s≤v i (t)≤1m / s, the angular velocity is set to -3rad / s≤w i (t)≤3rad / s, the adjacent index of each wheeled robot is N respectively 1 ={2}, N 2 ={1,3}, N 3 ={2,4}, N 4 ={1}. Performance , select the matrix R i =0.1I, Q ij =0.1I, Q i =[1,0,0;0,1,0;0,0,0.4], the state feedback control gain K i =[-1;-1;-1], according to Lemma 1, the matrix P can be obtained i =[50,0,0;0,50,0;0,0,20], the level value of the terminal constraint set is ε i = 0.1.
[0093] Step C: Set...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More