A Robust Preset Performance Control Method for Distributed Manipulator System
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology of preset performance and control methods, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as complex weight parameter adjustment and online use of complex and unfavorable control laws
Active Publication Date: 2021-11-16
JIANGSU VOCATIONAL INST OF ARCHITECTURAL TECH
View PDF6 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
Although the above controls are effective, there are two limitations: First, the use of neural networks will inevitably involve complex weight parameter adjustment issues. When the number of layers and nodes of the neural network increases, the problem will become more complicated and require a lot of effort. Computing resources are not conducive to the online use of control laws; secondly, the approximate nonlinearity of the neural network is only valid within the initially defined compact set range, how to ensure the effectiveness of network learning is a difficult problem to solve
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
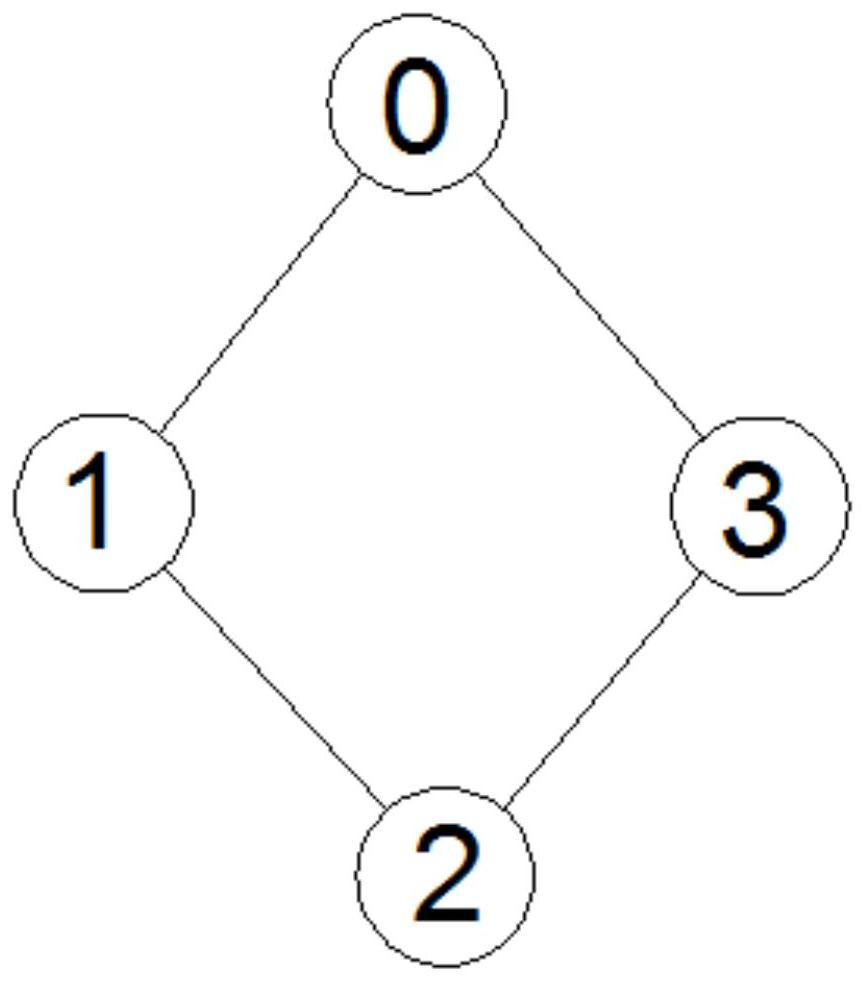
[0080] The present invention selects multiple second-order manipulator systems, a typical nonlinear mechanical system, as a research object, and performs master-slave stability control of multiple manipulator systems. Suppose there are 3 slave manipulator systems, one master manipulator system, and the information topology between master and slave manipulator systems is as follows: figure 1 shown.
[0081] In the distributed stability control study, the parameters of the slave manipulator are set as:
[0082] Slave arm system 1: m 1,1 =0.5kg, m 1,2 = 1.5kg, l 1,1 = 1.0m, l 1,2 =0.8m;
[0083] Slave arm system 2: m 2,1 = 1.0kg, m 2,2 = 2.0kg, l 2,1 = 1.5m, l 2,2 = 1.0m;
[0084] From robotic arm system 3: m 3,1 = 1.5kg, m 3,2 = 1.0kg, l 3,1 = 1.2m, l 3,2 = 1.0m;
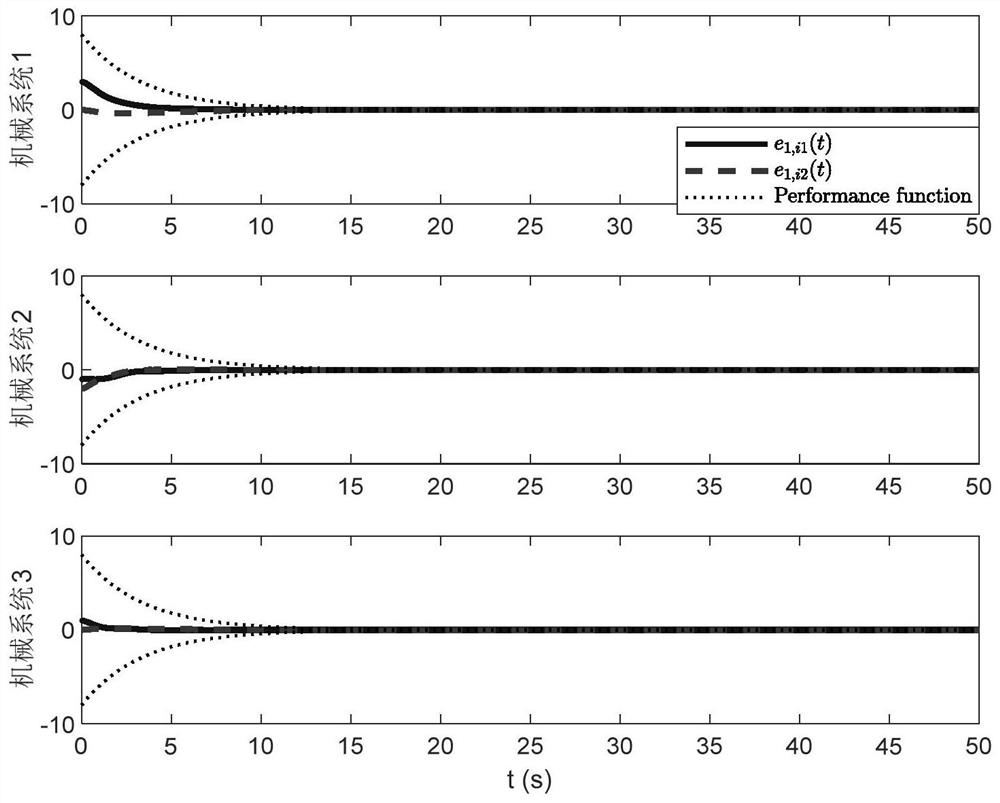
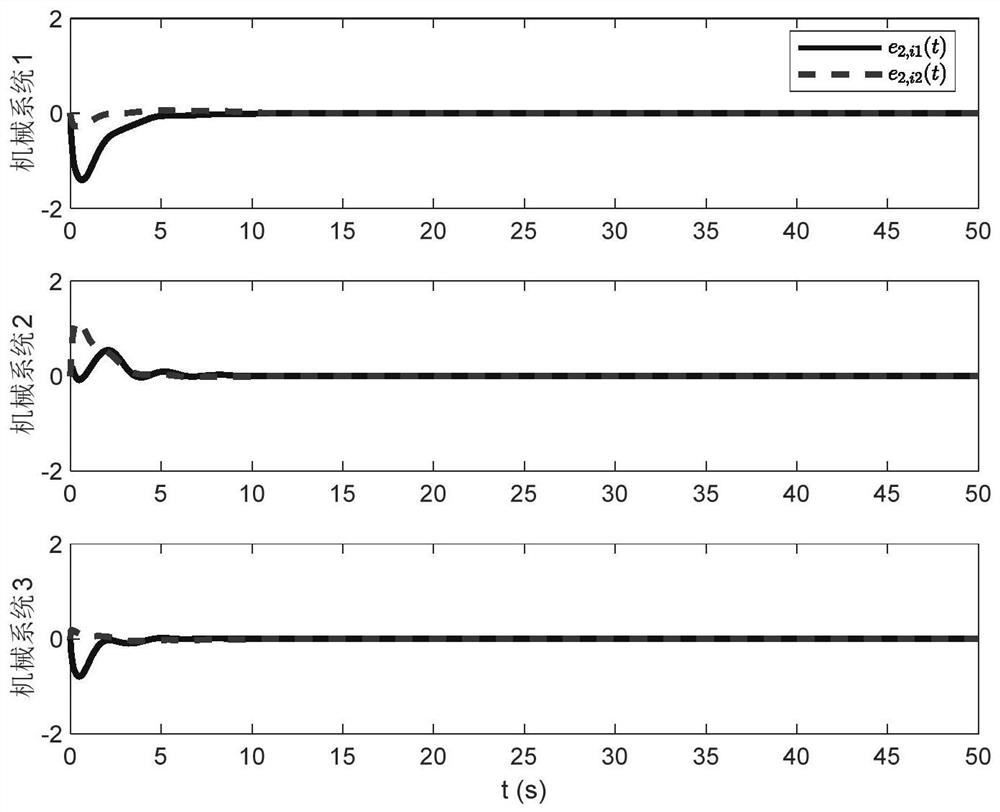
[0085] The performance function parameters of the three slave manipulator systems are all set as:
[0086] ρ i,0 =8,ρ i,∞ =0.01,l i =0.3,κ i,r =1(i=1,2,3);
[0087] The controller parameters of th...
Embodiment 2
[0092] Multiple second-order manipulator systems, a typical nonlinear mechanical system, are selected as the research object to carry out tracking control of multiple manipulator systems. The parameters and initial state of the control system are the same as those in the first embodiment.
[0093] Suppose the desired trajectory of the main manipulator system is:
[0094] The corresponding simulation results are as Figures 6 to 9 As shown in the figure, it can be concluded that 1) under the unknown dynamic model and external disturbance, the slave manipulator system can track the desired joint angle command in about 25s, and the preset joint angletracking error performance envelope can Realized in the whole time domain, compared with the stable control in the first embodiment, the response time of the distributed tracking follows the target instruction and there is a delay phenomenon; 2) the input from the manipulator system is bounded, so in the present invention A distri...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a method for controlling the robust preset performance of a distributed manipulatorsystem. The steps include: step 1, establishing a mathematical model of the distributed manipulatorsystem; step 2, designing preset performance constraints; and step 3, designing distribution Robust preset performance controller. This control method does not rely on nonlinear models and has low complexity. It not only realizes the angle stability and tracking control of multiple manipulator joints under unknown nonlinear and external disturbances, but also realizes the master-slave mechanical system to guarantee its transient and steady state. Performance tracking control; this preset performance control method can not only solve the problem of trajectory tracking control of a single mechanical system, but also solve the problem of collaborative control of multiple mechanical systems, further enriching the applicable objects of the preset performance control method. More practical mechanical system control problems provide a solid theoretical and methodological basis.
Description
technical field [0001] The invention relates to a method for controlling robust preset performance of a distributed mechanical arm system, belonging to the technical field of mechanical system control. Background technique [0002] In practical engineering, it is often necessary for multiple mechanical systems with simple structures to complete a complex task. On the one hand, the cooperative work of multiple mechanical systems can greatly improve the degree of freedom and reliability of the system, and on the other hand, it is also beneficial to reduce the cost of the controlled system. [0003] There are many research results on distributed control of multiple mechanical systems, such as finite-time distributed control method based on sliding mode control technology, adaptive distributed control based on neural network, distributed control based on event drive, etc. In order to realize the preset of the transient and steady-state performance of the distributed control sys...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.
Login to View More
Patent Type & AuthorityPatents(China)
IPC IPC(8): B25J9/16
CPCB25J9/16B25J9/1605B25J9/1664
Inventor张刚刘志坚侯文宝沈永跃吴玮李德路
OwnerJIANGSU VOCATIONAL INST OF ARCHITECTURAL TECH



 Login to View More
Login to View More  Login to View More
Login to View More