

Robust preset performance control method for distributed mechanical arm system
A technology of preset performance and control methods, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as complex weight parameter adjustment, complex and unfavorable online use of control laws, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
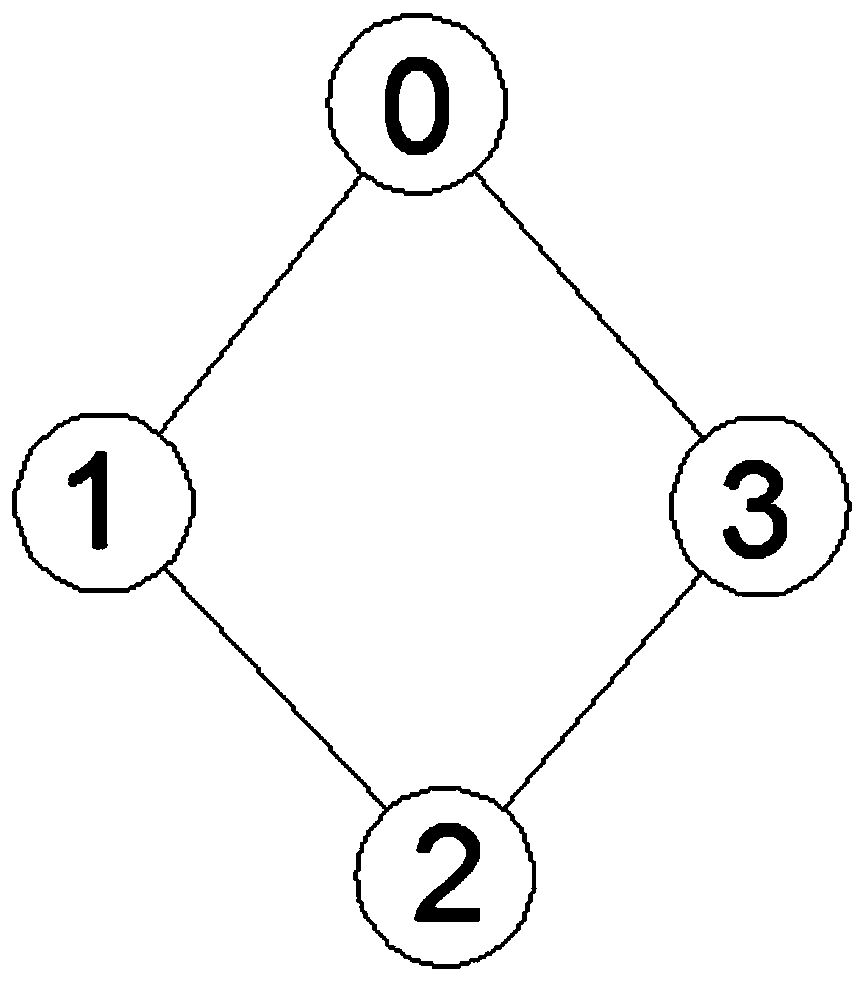
[0079] The present invention selects multiple second-order manipulator systems, a typical nonlinear mechanical system, as a research object, and performs master-slave stability control of multiple manipulator systems. Suppose there are 3 slave manipulator systems, one master manipulator system, and the information topology between master and slave manipulator systems is as follows: figure 1 shown.
[0080] In the distributed stability control study, the parameters of the slave manipulator are set as:
[0081] Slave arm system 1: m 1,1 =0.5kg, m 1,2 = 1.5kg, l 1,1 = 1.0m, l 1,2 =0.8m;
[0082] Slave arm system 2: m 2,1 = 1.0kg, m 2,2 = 2.0kg, l 2,1 = 1.5m, l 2,2 = 1.0m;
[0083] From robotic arm system 3: m 3,1 = 1.5kg, m 3,2 = 1.0kg, l 3,1 = 1.2m, l 3,2 = 1.0m;
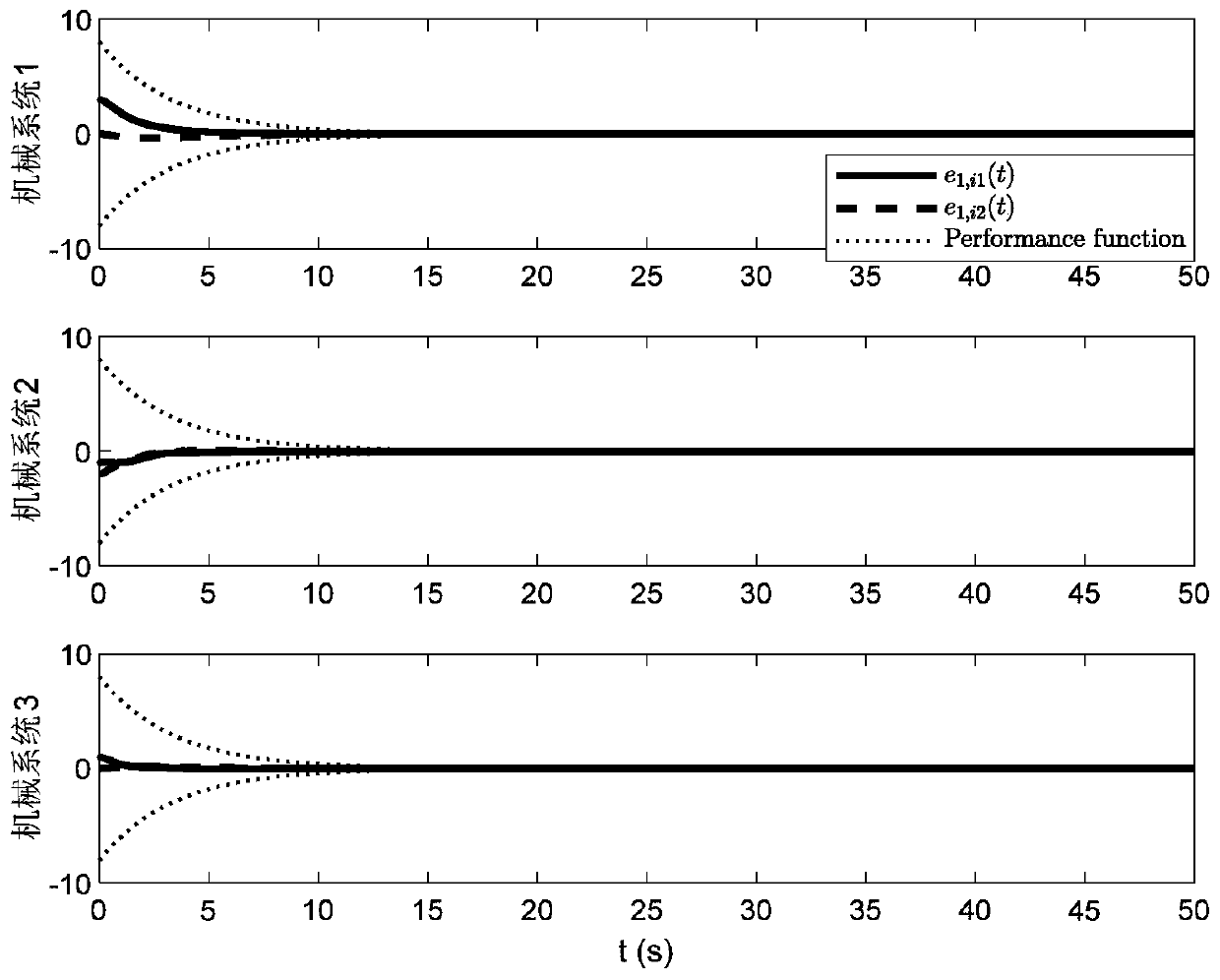
[0084] The performance function parameters of the three slave manipulator systems are all set as:
[0085] ρ i,0 =8,ρ i,∞ =0.01, kappa i,r =1(i=1,2,3);
[0086] The controller parameters of the t...
Embodiment 2
[0091] Multiple second-order manipulator systems, a typical nonlinear mechanical system, are selected as the research object to carry out tracking control of multiple manipulator systems. The parameters and initial state of the control system are the same as those in the first embodiment.
[0092] Suppose the desired trajectory of the main manipulator system is:
[0093] The corresponding simulation results are as Figures 6 to 9 As shown in the figure, it can be concluded that 1) under the unknown dynamic model and external disturbance, the slave manipulator system can track the desired joint angle command in about 25s, and the preset joint angle tracking error performance envelope can Realized in the whole time domain, compared with the stable control in the first embodiment, the response time of the distributed tracking follows the target instruction and there is a delay phenomenon; 2) the input from the manipulator system is bounded, so in the present invention A distri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More