

Constraint-Oriented Nonsingular Terminal Sliding Mode Force-Position Control Method for Reconfigurable Manipulators
A non-singular terminal and control method technology, applied in the field of robot control methods and constrained system control, can solve problems such as chattering, slow convergence speed, and low tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described in detail below in conjunction with the accompanying drawings.
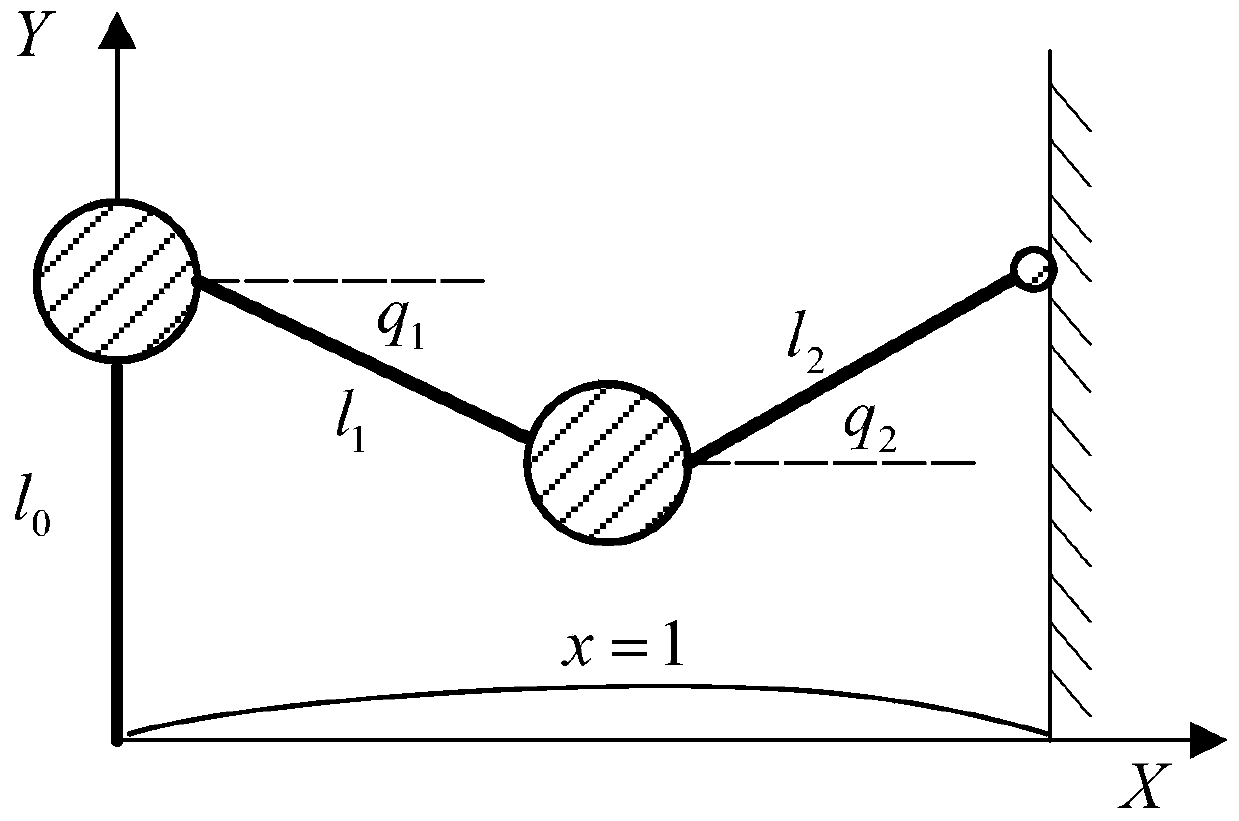
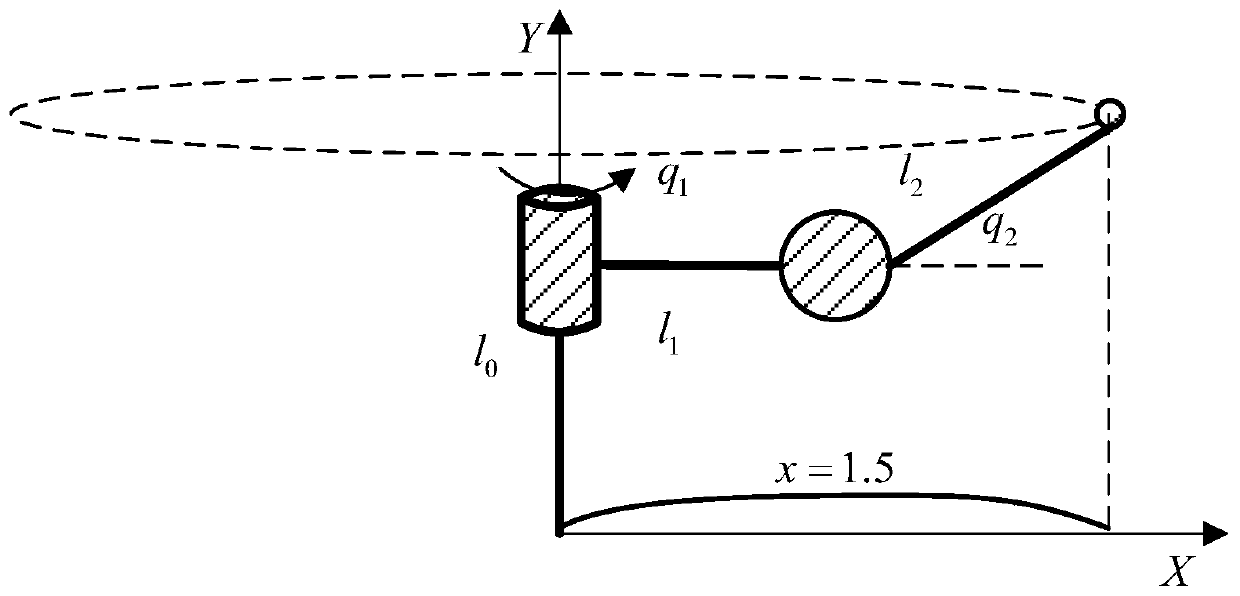
[0045] The constraint-oriented non-singular terminal sliding mode force position control method of the reconfigurable manipulator described in the present invention is generally suitable for integrating standard modules and interfaces, and can recombine and configure its own configuration according to different task requirements. Construct the robotic arm system. Since the control method designed in the present invention is applicable to various manipulator configurations, two configurations A and B are selected as examples to illustrate the effectiveness of the method designed in the invention.
[0046] Such as figure 1 As shown, the configuration A of the application object of the constraint-oriented reconfigurable manipulator non-singular terminal sliding mode force position control method of the present invention, for the convenience of description, conf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More