Unmanned aerial vehicle position estimation system and estimation method based on visual sensor
A visual sensor and unmanned aerial vehicle technology, applied in the direction of control/regulation system, three-dimensional position/course control, vehicle position/route/altitude control, etc., can solve problems such as limited bandwidth, high price, limited use range, etc., to avoid Transmission delay, high resource utilization, and the effect of real-time estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
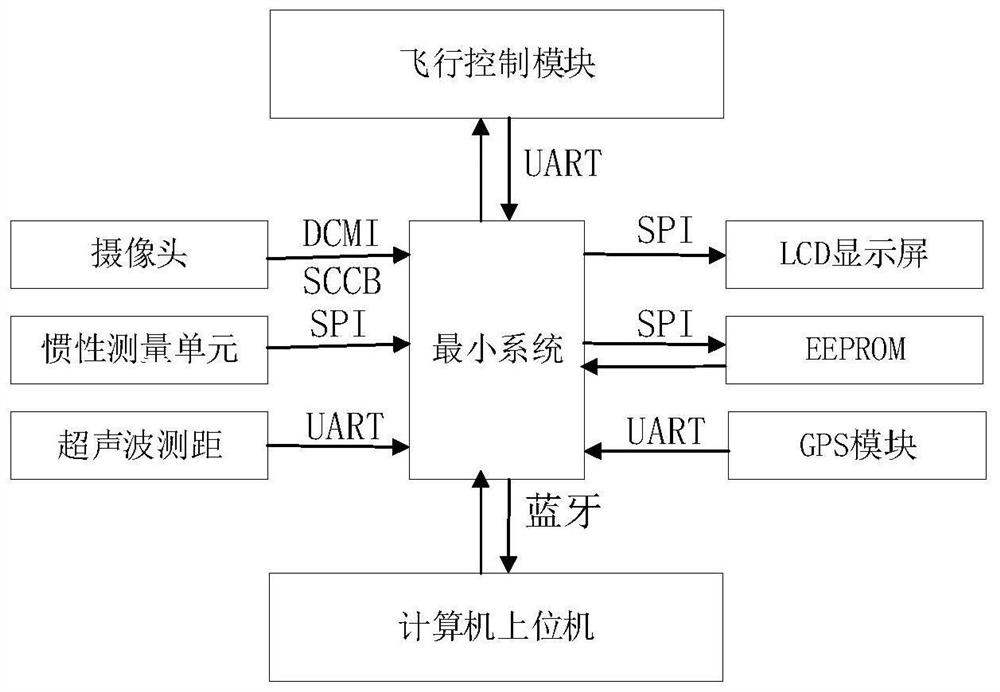
[0047] Such as figure 1 As shown, a visual sensor-based UAV position estimation system of the present invention includes an MCU module and a flight control module mounted on the UAV; the MCU module is respectively connected to a camera, an inertial measurement unit, an ultrasonic ranging sensor, GPS sensor, LCD display screen, EEPROM; the MCU module realizes data transmission between the flight control module and the universal asynchronous transceiver transmitter; the MCU module communicates with the upper computer of the computer through bluetooth Data transmission is realized; the installation angle of the inertial measurement unit is parallel to the body of the UAV...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More