

A mission planning method for heavy duty UAV based on energy analysis
A mission planning and energy analysis technology, applied in the field of drones, can solve problems such as short battery life, limited battery capacity, and reduced battery life, so as to ensure flight safety, improve accuracy, and increase task load.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
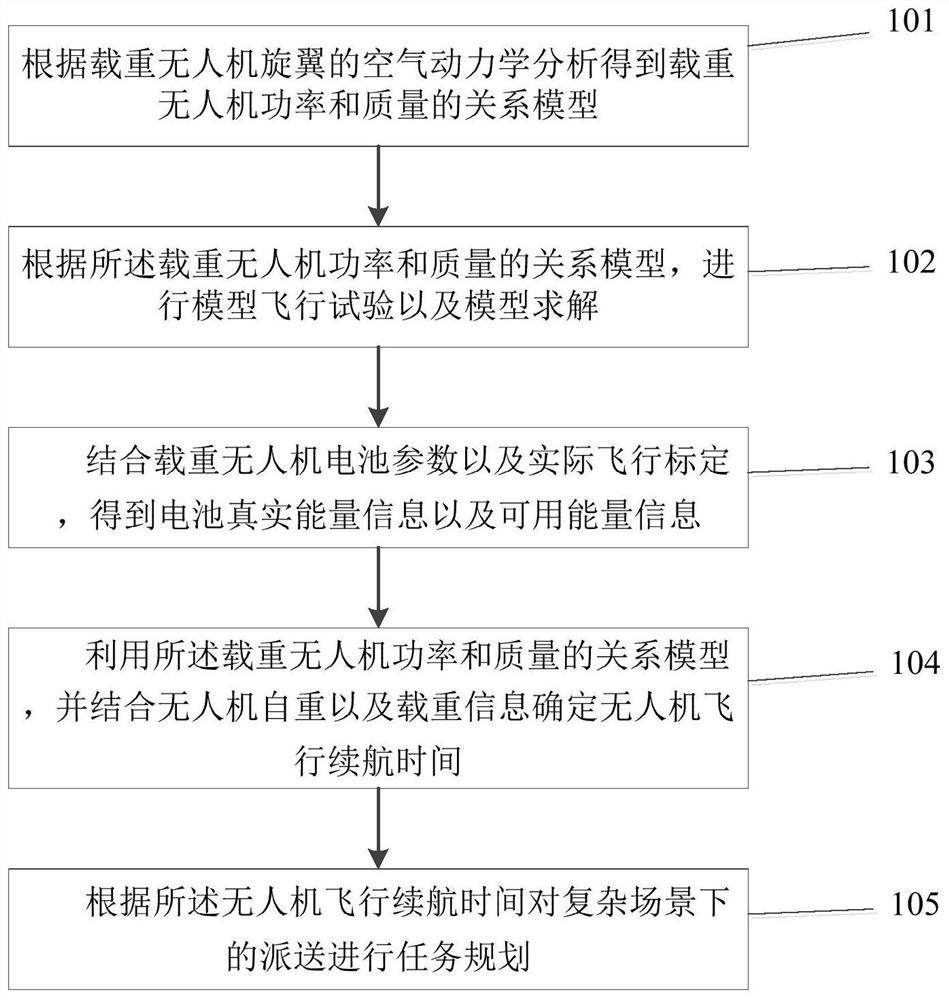
Method used
Image

Examples
example 1
[0091] Example 1: A transport scenario similar to post-disaster relief supplies, that is, point-to-point single transport. The same scene also includes the transportation of rare materials in remote mountainous areas.
[0092] In this scenario, the drone is required to bring supplies to the target point and return empty.
[0093] Let the weight of the drone be m 0 , the material weight is m 1 , the distance from the starting point to the target point is S 1 .
[0094] That is, the energy required for this task is:
[0095] if C useable A larger energy C than the task requires indicates that the task is feasible.
example 2
[0096] Example 2: A short-distance one-to-many delivery task similar to urban logistics. Similar scenarios may include drones delivering food, etc.
[0097] like Figure 4 As shown, in a logistics warehouse center, there may be four or more express tasks of ABCD at the same time. After the task route is planned by the path planning module, this method is used to analyze the path planning.
[0098] Obviously, the method of the present invention is not only applicable to the scenario of unmanned aerial vehicle logistics delivery, but also applicable to receiving and other multi-link delivery scenarios such as drone take-out.
[0099] Suppose the weight of the drone is m 0 , plus the set of warehouses and the total number of n target points is set to N, and the warehouse is set to N 0 , the set of target points is set to N c , the shipment quality of the target point is M respectively i , the distance from target point i to target point j is set as D ij .
[0100] Assuming...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More