

Hovercraft high-speed rotation control method based on longitudinal speed planning
A technology of longitudinal speed and control method, applied in two-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control, etc. Complexity and other issues, to achieve the effect of improving reliability and safety, improving mobility and workability, and avoiding tail flicks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077]The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
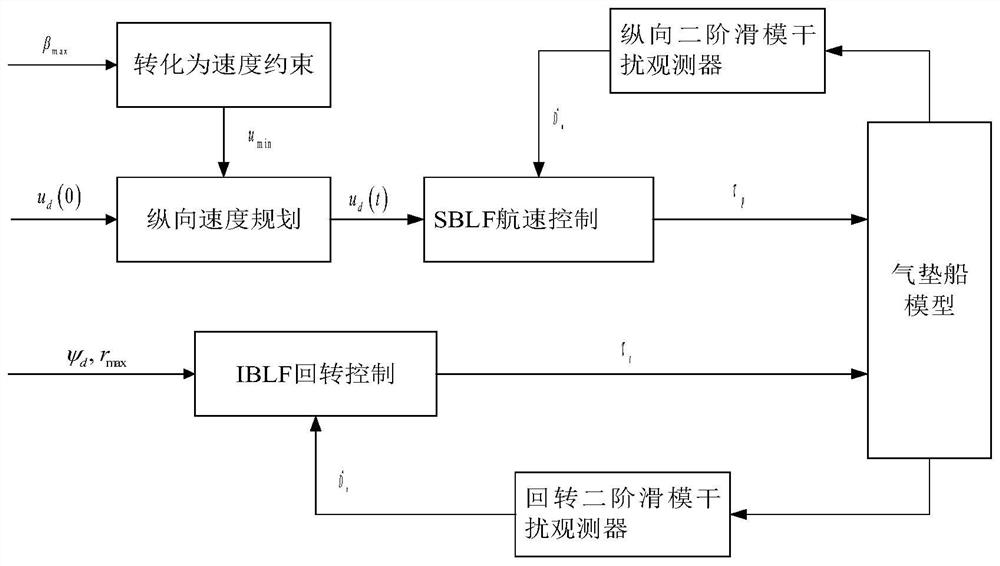
[0078] The basic principle block diagram of the present invention is as figure 1 As shown, the specific implementation is as follows:
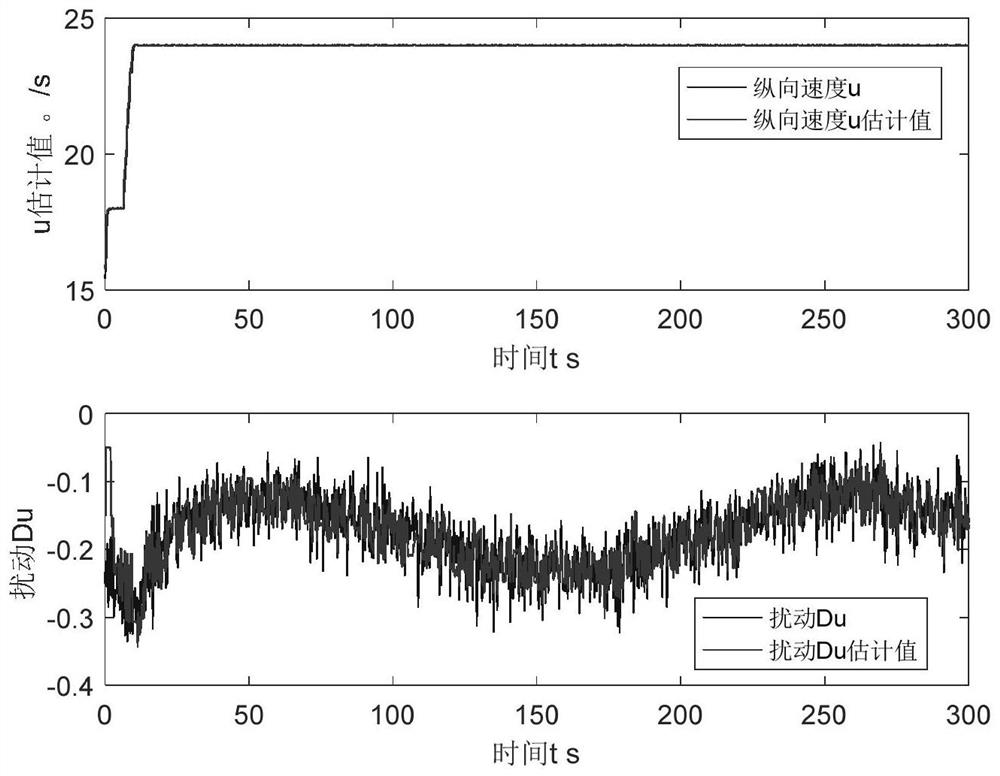
[0079] 1. Based on the four-degree-of-freedom model of the hovercraft, a second-order sliding mode observer is designed to estimate the uncertainty and disturbance of the system model for the longitudinal and rotational degrees of freedom;
[0080] Step 1. Establish the four-degree-of-freedom model of the hovercraft as
[0081]
[0082] Among them, m is the mass of the hovercraft, J x ,J z are the moments of inertia around the longitudinal and vertical directions; u, v, p, r are the longitudinal velocity, lateral velocity, heel angular velocity, and gyration angular velocity respectively; F xD , F yD , M xD , M zD Respectively represent the precise longitudinal resistance, lateral resistance ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More