

Robot system for monitoring horizontal displacement of foundation pit deep layer and automatic monitoring method
A robot system and horizontal displacement technology, applied in the field of measurement, can solve the problems of large positioning error, bulky cables, and large amount of instruments, so as to improve efficiency and accuracy, solve inefficiency, and reduce errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention adopts following technical scheme:
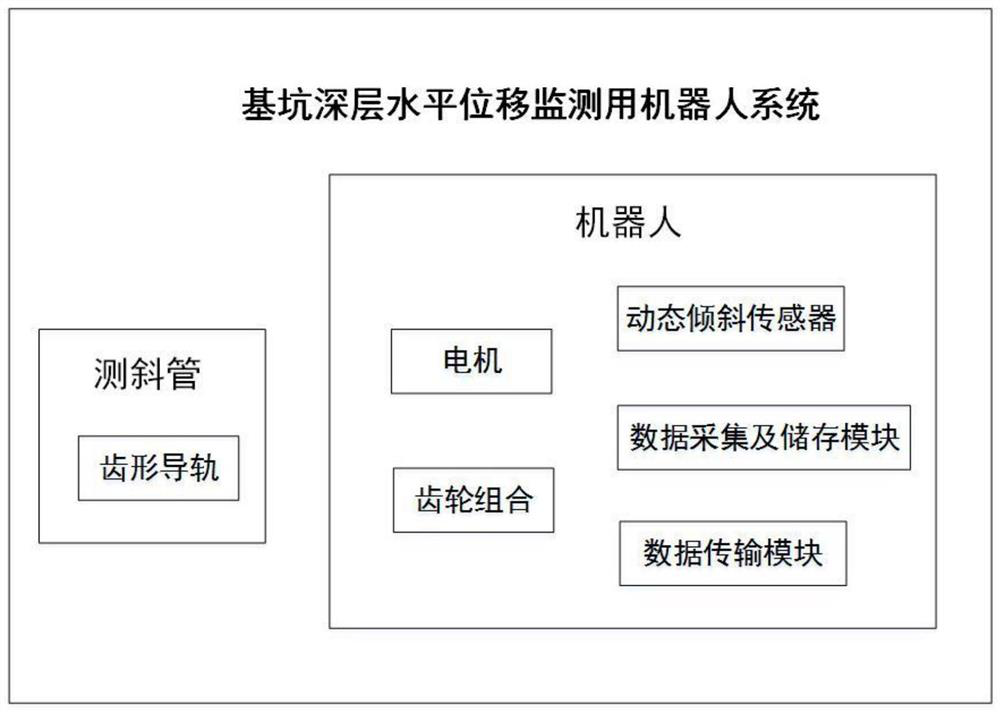
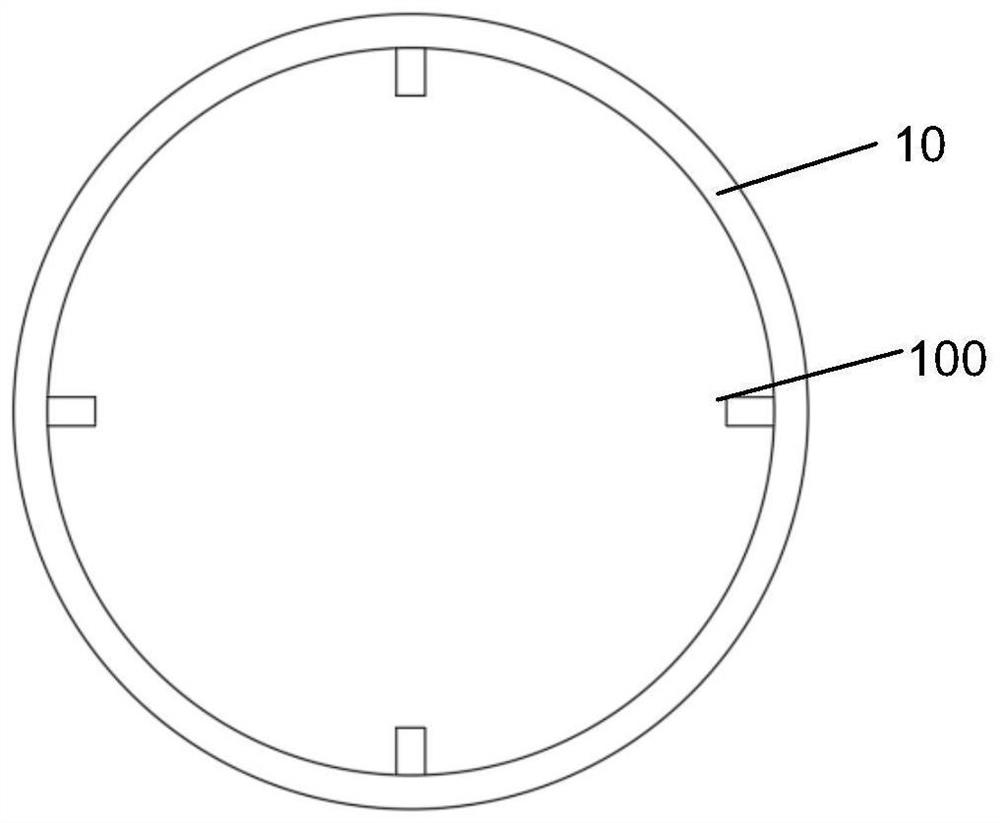
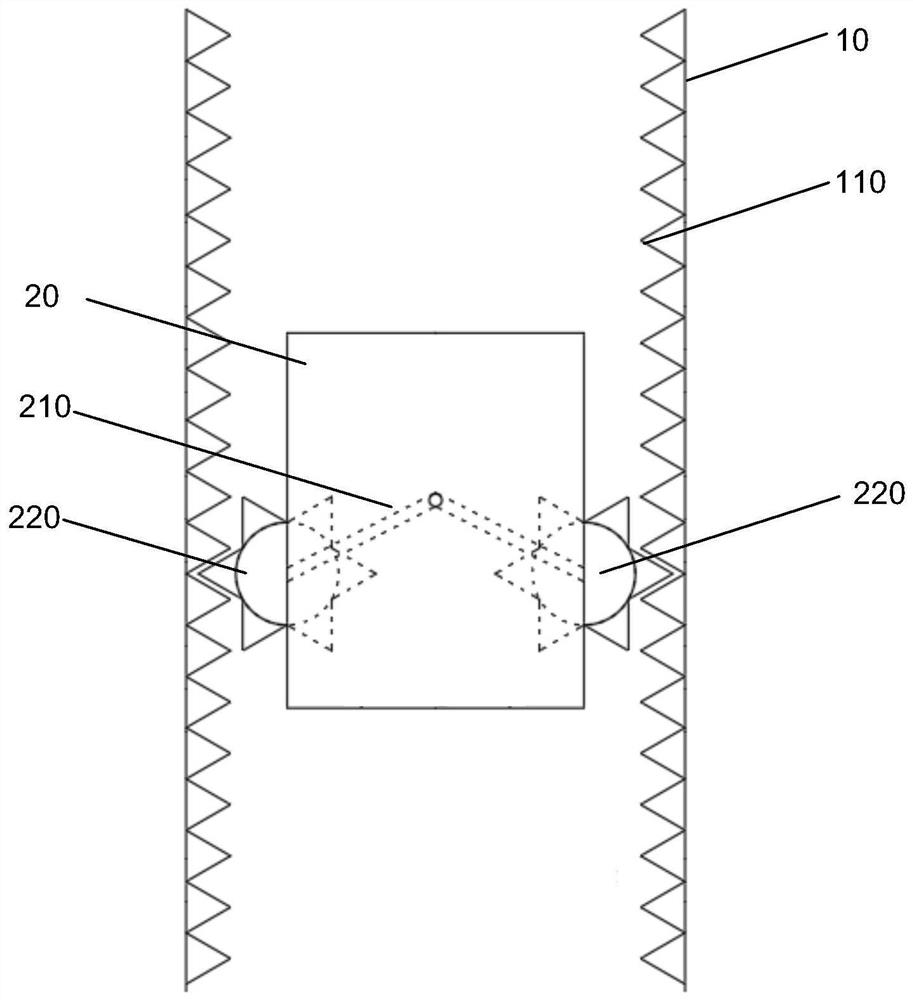
[0036] Such as figure 1 , the structural block diagram of the automatic monitoring system for deep foundation pit horizontal displacement in the embodiment of the present invention, comprising: a toothed guide rail and a motor-driven robot, the toothed guide rail is installed in the inner guide groove of the inclinometer tube; the robot is provided with a motor, Gear combination, dynamic inclination sensor, tooth number counter, data acquisition and storage module, data transmission module; the gear combination is matched with the toothed guide rail, and the motor drives the gear combination to run for the robot to move up and down in the inclinometer tube, and the gear The combination is connected with the robot through an active spring to adapt to the curvature of the inclinometer tube; the dynamic inclination sensor records the angle value of the robot at different positions; the tooth number counter position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More