

Mechanical fault diagnosis method based on multi-sensor fusion
A multi-sensor fusion and mechanical failure technology, applied in mechanical bearing testing, machine/structural component testing, instruments, etc., can solve the problem of not considering the mutual influence of evidence, the inability to accurately measure the degree of evidence conflict, and the inability to accurately measure conflict degree etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
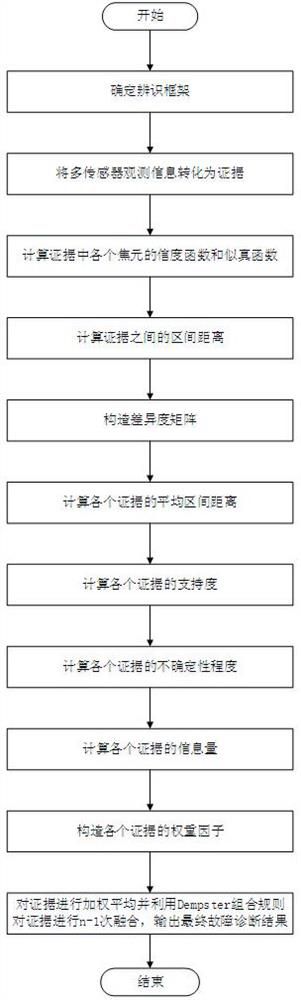
[0083] Example 1, set the identification frame as: Θ={θ 1 ,θ 2}, the results collected by 2 independent sensors are transformed into evidence as shown below.
[0084] m 1 :m 1 (θ 1 )=0.3,m 1 (θ 2 )=0.5,m 1 (θ 1 ,θ 2 ) = 0.2
[0085] m 2 :m 2 (θ 1 )=0.3,m 2 (θ 2 )=0.5,m 2 (θ 1 ,θ 2 ) = 0.2
[0086] From the distribution of focal elements in Example 1, it can be seen that the evidence m 1 and m 2 In perfect agreement, the evidence m 1 and m 2 There is no conflict between, that is, evidence m 1 and m 2 The conflict between is 0, table 1 has given the conflict coefficient K in the evidence theory and the method d proposed by the present invention X (m i ,m j ) for the results obtained in Example 1. The conflict coefficient is expressed as:
[0087]
[0088] in, represented as the empty set, A l as evidence m 1 Jiao Yuan, B s as evidence m 2 Jiao Yuan, N is the number of elements in the recognition frame.
[0089] The data in Table 1 shows ...
example 2
[0092] Example 2: Set the identification frame as: Θ={θ 1 ,θ 2 ,…,θ 10}, the results collected by 2 independent sensors are transformed into evidence as shown below.
[0093] case1:
[0094] case2:
[0095] case3:
[0096] case4:
[0097] case5:
[0098] The interval distance of the patent of the present invention is used below with two kinds of classic distances in evidence theory: Jousselme evidence distance d in document [1] J And the Pignistic probability distance difBetP in [2] is solved for Example 2. Table 2 presents the results of solving the above five cases.
[0099] Table 2 Measures of Conflict Between Evidence in Example 2 Results
[0100]
[0101] From the distribution of focal elements in Example 2, it can be seen that the evidence m in case1-case5 1 and m 2 They all support different focal elements, which are totally opposite evidences. In this extreme case, the evidence m 1 and m 2 The conflict between should reach a maximum value of ...
example 3
[0102] Example 3: Set the identification frame as: Θ={θ 1 ,θ 2 ,θ 3}, the results collected by 2 independent sensors are transformed into evidence as shown below.
[0103] m 1 :m 1 (θ 1 )=0.6,m 1 (θ 2 )=0.1,m 1 (Θ) = 0.3
[0104] m 2 :m 2 (θ 1 )=0.7,m 2 (θ 2 )=0.2,m 2 (θ 3 ) = 0.1
[0105] The method of cosine correlation coefficient 1-cor for the conflict between the interval distance of the patent of the present invention and the method of measuring evidence in [3] is used to solve Example 3 below. Table 3 presents the measured results.
[0106] Table 3 Measures of Conflict Between Evidence in Example 3 Results
[0107]
[0108] In Example 3, evidence m 1 and m 2 are two different sets of evidence, so the evidence m 1 and m 2 There is a certain conflict between, and the value of 1-cor in the literature [3] is 0, indicating that the evidence m 1 and m 2 There is no conflict between, which is wrong. And the method proposed by the patent of the prese...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More