

Benthic floating hybrid underwater mobile detection platform and detection method thereof
A detection platform and hybrid technology, applied in underwater operation equipment, geophysical measurement, ships, etc., can solve the problem of inability to meet the needs of long-term resident detection work, the impact of economy and applicability, and the slow sailing speed. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
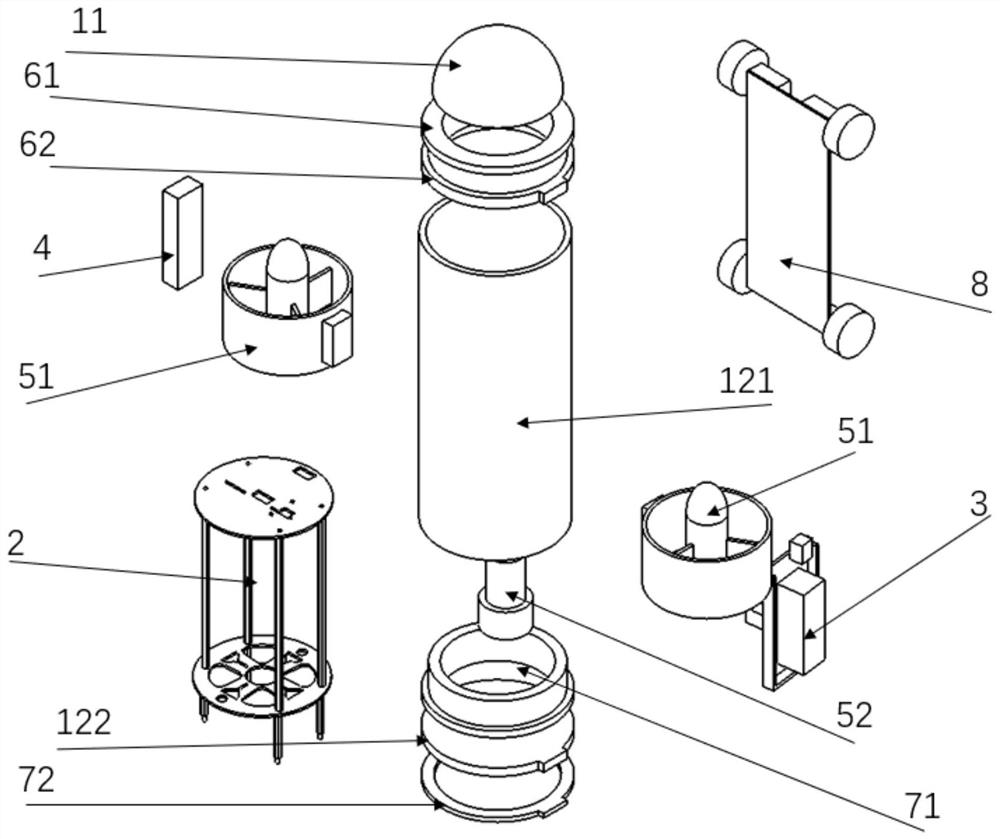
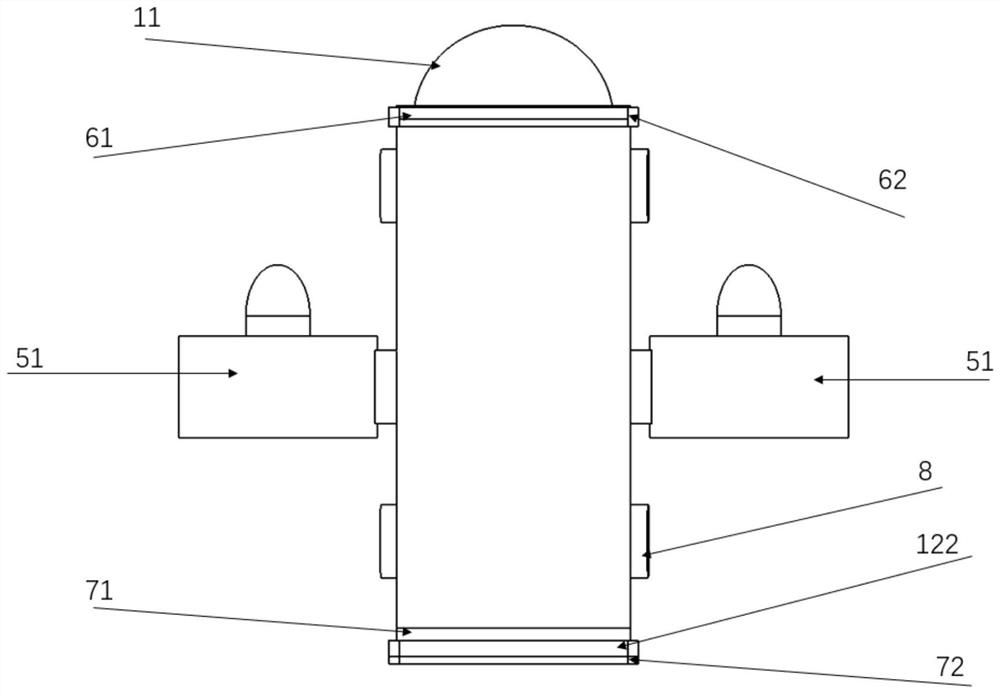
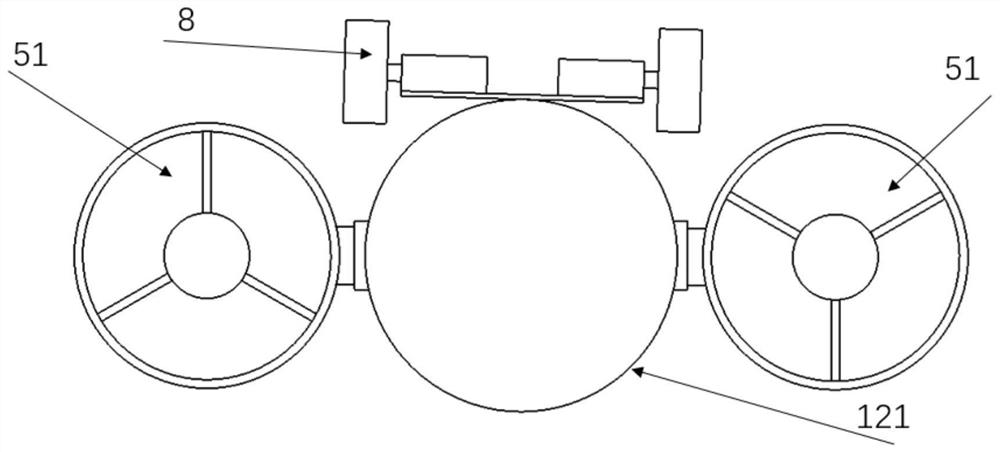
[0031] The invention provides a benthic-floating hybrid underwater mobile detection platform, which includes a pressure-resistant cabin 1 , a controller 3 , a power source 4 and a driving mechanism 5 . The pressure-resistant cabin 1 is a cylindrical structure with a closed cavity, and the controller 3 and the power supply 4 are installed in the cylindrical body of the pressure-resistant cabin 1 . The controller 3 includes a control module and a data acquisition module for collecting data and controlling the driving mechanism 5 . The power supply 4 can be a lithium battery or the like. The driving mechanism 5 includes a propeller 51 , a suction and drainage pump 52 and a gravity bag 53 . Among them, there are two groups of propellers 51, and the two groups of propellers 51 are installed symmetrically on both sides of the pressure chamber 1, and the two groups of symmetrically arranged propellers 51 drive the pressure chamber 1 to move forward or turn. The gravity bag 53 is fi...
Embodiment 2
[0035] This embodiment 2 is formed on the basis of embodiment 1. Through the structural design of the detachable pressure chamber and the setting of the bearing frame, the modular customization and supporting installation of underwater detection and data acquisition workpieces are realized, which is convenient for modification design , has a good carrying type. specific:
[0036]The pressure chamber 1 is preferably a detachable split structure, which facilitates the installation of components such as the controller 3 and the power supply 4 . When the pressure cabin 1 is a split structure, it preferably includes a cone forging 11 and a cylindrical section 12, the cone section 11 is preferably conical or hemispherical, and the cone section 11 can effectively guide the flow as the bow of the pressure cabin 1 The cylinder section 12 is a cylinder with one end open, and the end surface of the cone section 11 is fastened to the open end of the cylinder section 12 to form a pressure...
Embodiment 3
[0040] This embodiment 3 is a detection method of a benthic-floating hybrid underwater mobile detection platform formed on the basis of embodiment 1 or embodiment 2, and the benthic-floating hybrid underwater mobile detection platform is used for detection , including the following steps:
[0041] S1, the step of diving: when the benthic-planktonic hybrid underwater mobile detection platform is diving, the propellers 51 located on both sides of the pressure chamber 1 and the walking trolley 8 are in a static state, and the pumping and draining pump 12 is controlled by the controller 3 The water outside the pressure-resistant cabin 1 is pumped into the gravity bag 53, and the benthic-floating hybrid underwater mobile detection platform reaches a predetermined depth by increasing gravity.
[0042] S2, water movement step: when the benthic-floating hybrid underwater mobile detection platform reaches the predetermined depth, the propellers 51 on both sides of the pressure-resistan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More