

Atomic gyroscope navigation system and navigation solution method thereof
A navigation system and navigation solution technology, applied in the field of inertial navigation system, can solve problems such as application characteristics of SERF atomic spin gyroscope, design navigation system architecture and navigation solution method, etc., and achieve strong effectiveness and practicability. The effect of small error value and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
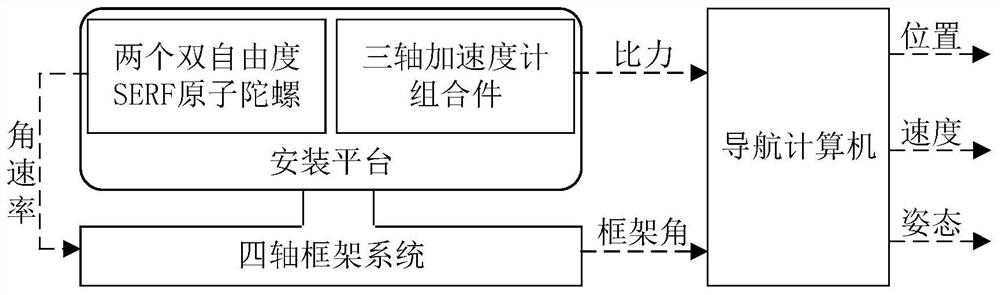
[0102] Such as figure 1 As shown, the atomic gyro navigation system includes a first two-degree-of-freedom SERF atomic gyroscope, a second two-degree-of-freedom SERF atomic gyroscope, a three-axis accelerometer assembly, an installation platform, a four-axis frame system and a navigation computer; the installation platform is set horizontally and Fixed on the top of the four-axis frame system, the first two-degree-of-freedom SERF atomic gyroscope, the second two-degree-of-freedom SERF atomic gyroscope and the three-axis accelerometer assembly are fixed on the installation platform; the navigation computer is set on the adjacent side of the four-axis frame system, and its The data transmission lines are respectively connected to the first two-degree-of-freedom SERF atomic gyroscope, the second two-degree-of-freedom SERF atomic gyroscope, the three-axis accelerometer assembly and the measurement modules of the four-axis frame system; wherein,
[0103] The angle measurement modul...
Embodiment 2
[0110] Such as image 3 Shown, a kind of navigation solving method that adopts the atomic gyro navigation system of embodiment 1 to realize, its steps are as follows:
[0111] S1. Construct the earth-centered inertial coordinate system, the earth-centered fixed earth coordinate system, the local geographic coordinate system, the vehicle coordinate system, the platform coordinate system, the three-axis accelerometer assembly coordinate system and the navigation solution coordinate system;
[0112] The specific construction steps are as follows:
[0113] S101, construct the earth-centered inertial coordinate system, that is, by x i ,y i and z i The i system composed of axes, the origin is at the center of the earth; x i The axis is parallel to the intersection line of the local meridian plane and the equatorial plane at the initial moment (t=0), pointing from the center of the earth to the positive direction of the periphery; z i axis coincides with the Earth's rotation axi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More