Decentralized tracking control method for mechanical arm based on event triggering-neural dynamic programming
An event-triggered, neural dynamic technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as locking or tremor of manipulators, difficulty in advancing event-triggered control algorithms, and difficult dynamic models, etc., to reduce output consumption , contact force and position tracking performance continuous and smooth effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0068] The present invention will be described in further detail below in conjunction with the accompanying drawings.
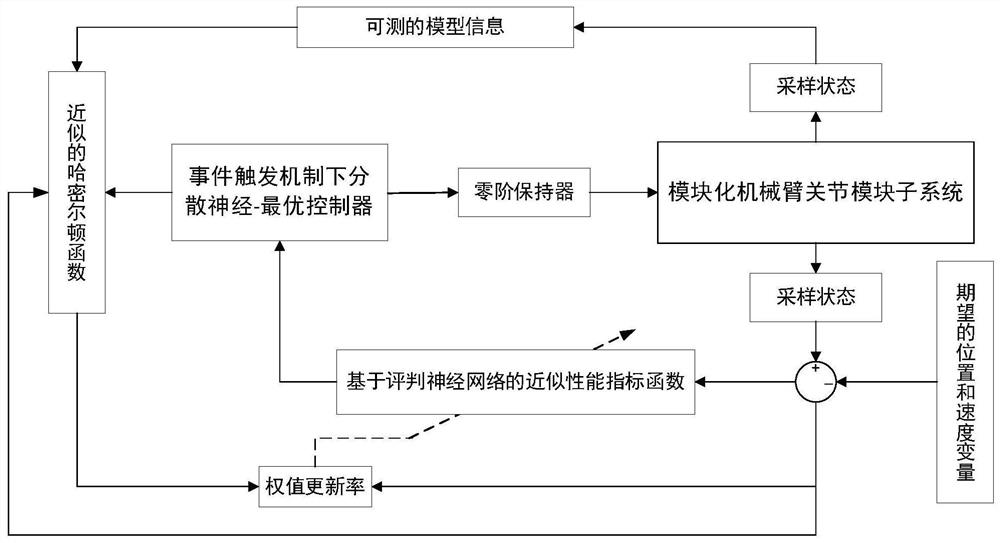
[0069] Such as figure 1 As shown, the present invention relates to an event-triggered-neural dynamic programming manipulator decentralized tracking control method, and the specific implementation method and process are as follows:
[0070] 1. Establishment of dynamic model
[0071] Consider an n-degree-of-freedom modular manipulator system, using the joint torque feedback technology to express its dynamic model as:
[0072]
[0073] Among them, q i is the i-th joint position; is the joint angular velocity; is the joint angular acceleration; I mi is the moment of inertia of the motor; γ i is the reduction ratio of the reducer; Dynamically coupled cross-linking term between joints; τ fi is the torque information measured by the joint torque sensor; τ i is the output torque of the motor; is the friction torque item, which will be defined as a fu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More