

Multi-motion-mode wheel-leg separation type quadruped robot
A quadruped robot, multi-motion technology, applied in the field of robots, can solve problems such as poor carrying capacity and complex mechanical structure of robots, and achieve the effects of large carrying capacity, improved work adaptability, and easy processing and manufacturing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to further illustrate the technical solutions of the present invention, the present invention will be further described below through examples.
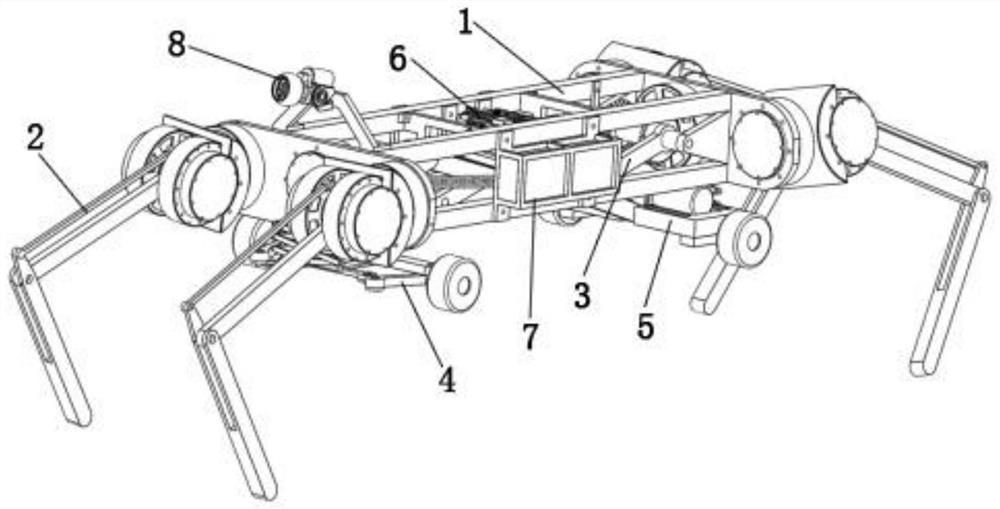
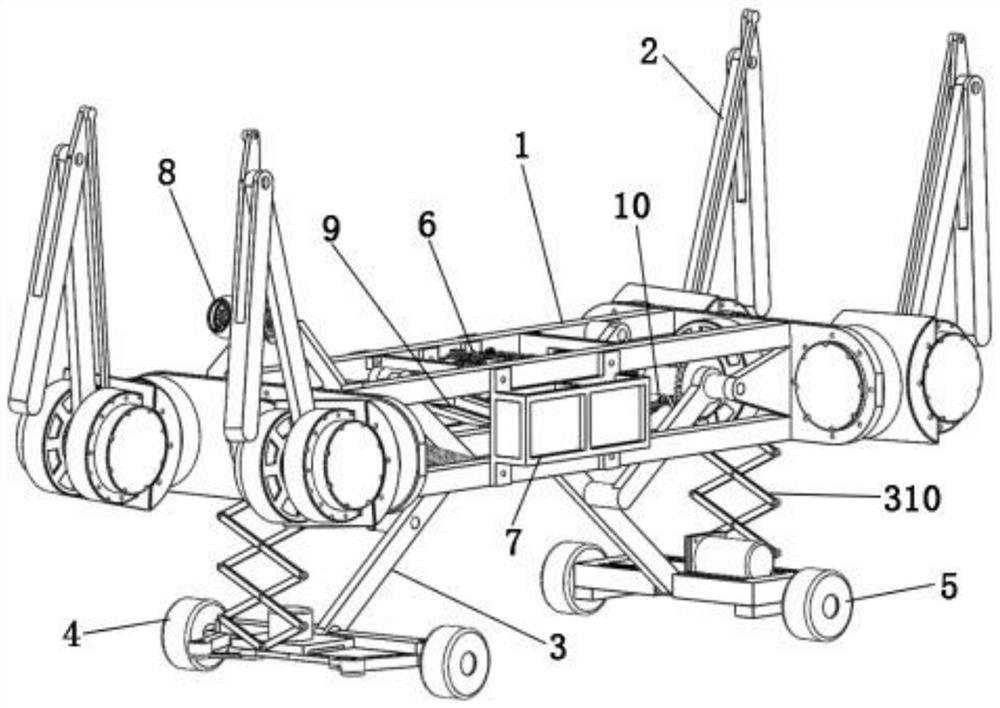
[0033] like Figure 1 to Figure 12 , multi-motion mode wheel-leg separation quadruped robot, including body 1, outriggers 2, wheel lifting mechanism 3, front wheel module 4, rear wheel module 5, control system 6, battery energy storage module 7, visual sensor 8 , electromagnetic adsorption mechanism 9 and spring energy storage mechanism 10;
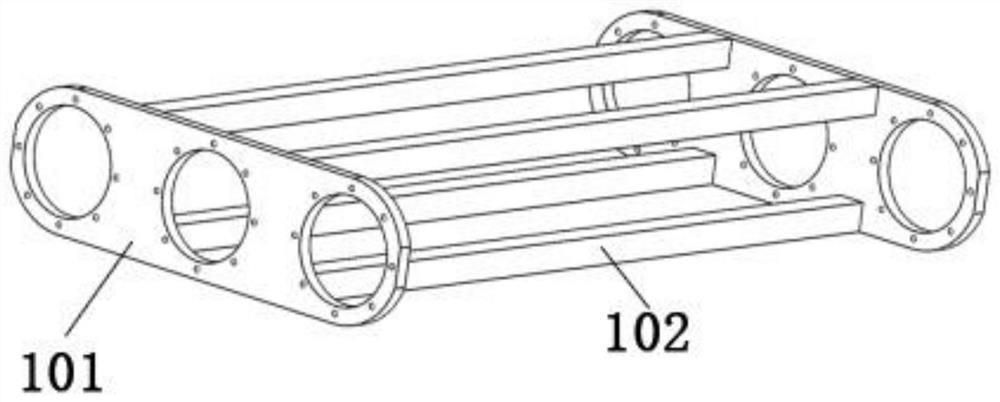
[0034] The fuselage 1 includes two vehicle frames 101, and a plurality of connecting shafts 102 are arranged between the two vehicle frames 101 to realize the connection between the front and rear two vehicle frames 101;
[0035]There are four outriggers 2, which are located on the left and right sides of the two frames 101, respectively. The outriggers 2 include an arc motor frame 201, a thigh rod 202, a calf rod 203, an auxiliary rotation long rod 204, and an auxiliary rotatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More