Small sample underwater target identification method based on deep forest
A technology of underwater target and recognition method, which is applied in the direction of neural learning method, vibration measurement in fluid, measurement vibration, etc., can solve the problem of unsatisfactory target recognition in water, and achieve the effect of improving the recognition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
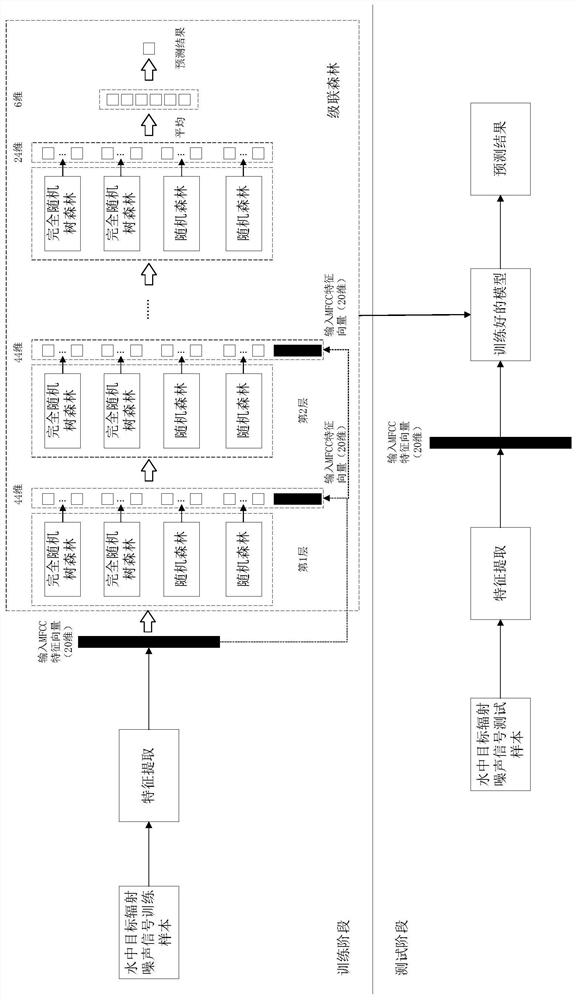
[0036] combined with figure 1 And attached figure 2 , the present invention is based on deep forest small sample water object recognition method, comprises the following steps:
[0037] Step 1, deploy the hydrophone in the ocean, collect and record the radiation noise signals of the six types of underwater targets, and segment the recorded signals in units of 5 s to obtain the radiation noise signal sample sets of the six types of underwater targets;
[0038] Step 2, extract the Mel-frequency cepstral coefficient MFCC feature of each radiation noise signal sample after segmentation, and obtain the feature vector corresponding to each radiation noise signal sample, and the dimension of the feature vector is selected as 20; when dividing into frames, the frame length is selected as 2048, select 512 for frame shift; select Hanning window for windowing; select 2048 for FFT points; select 128 for the number of filters in the Mel filter bank; select 16000 for signal sampling rate;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More