Tilting three-rotor unmanned aerial vehicle nonlinear control method based on data driving
A nonlinear control and data-driven technology, applied in non-electric variable control, three-dimensional position/course control, vehicle position/route/altitude control, etc. To solve problems such as model dynamics, achieve good control accuracy and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
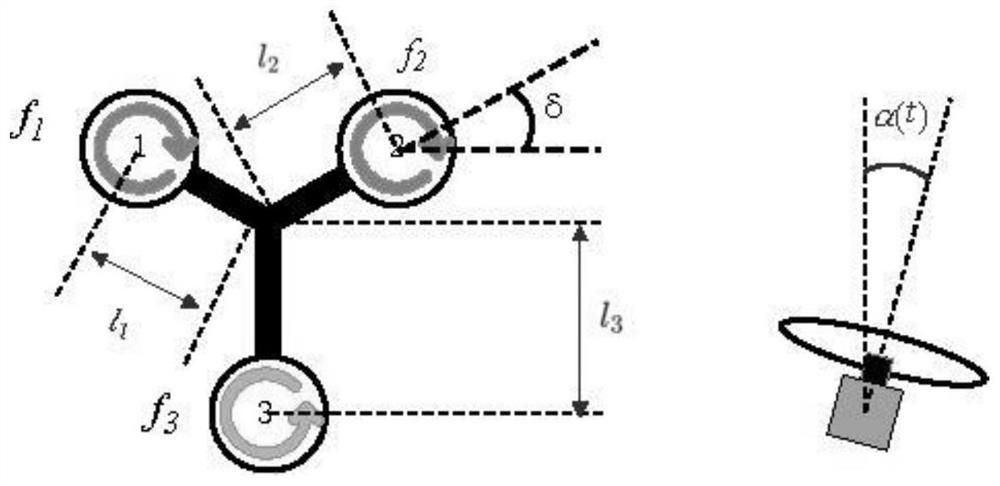
[0122] The invention relates to the nonlinear control of a tilting three-rotor UAV. Aiming at the situation that the precise model of the tilting trirotor UAV system is difficult to obtain and there are external disturbances, a model-free adaptive sliding mode control method (MFASC) is proposed. This method uses a data-driven model-free adaptive control method to estimate the attitude and height mathematical models of the three-rotor UAV in real time, and uses a discrete sliding mode control method to compensate for estimation errors and external disturbances, and realizes the tilting of the three-rotor UAV. Stable control of attitude and altitude direction, and has certain robustness to external disturbances. It is specifically related to the data-driven attitude and height control method of tilting trirotor UAV.
[0123] The purpose of the present invention is to overcome the above-mentioned deficiencies of the prior art, reduce the dependence of the tilting trirotor UAV on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com