Layered rapid terminal sliding mode control method for double-pendulum system of crane
A technology of terminal sliding mode and control method, which is applied in the direction of load hanging components, transportation and packaging, etc., can solve the problems such as the difficulty in anti-sway control of the double pendulum system of cranes, and achieve the effects of wide application range, convenient application, and easy industrial application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with accompanying drawing:
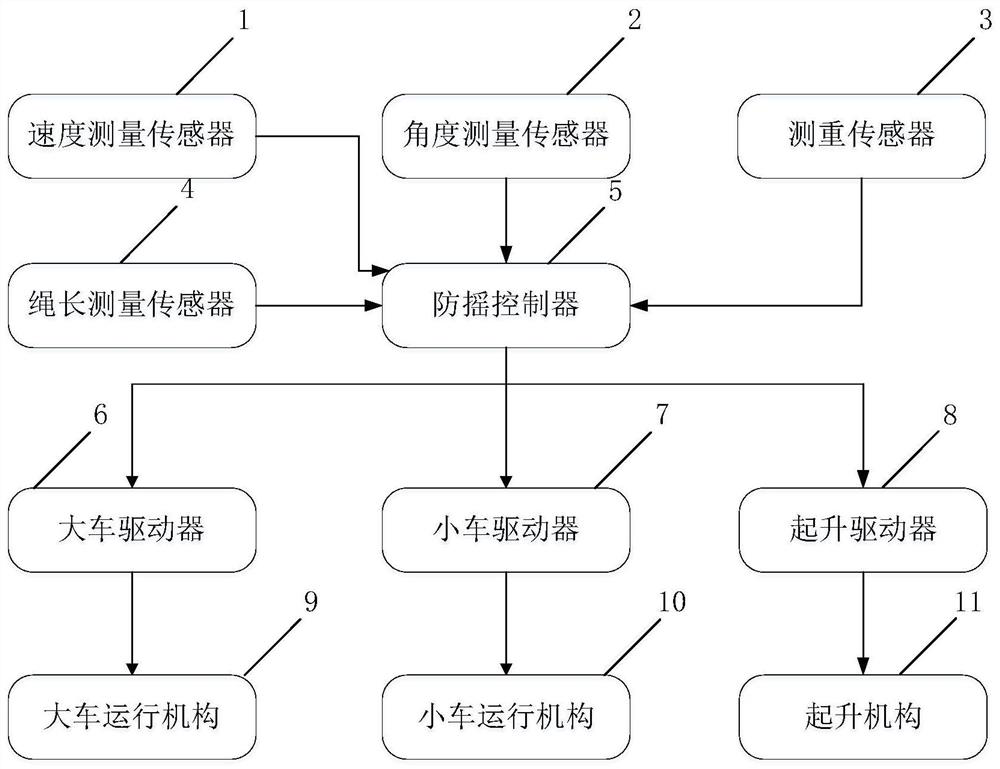
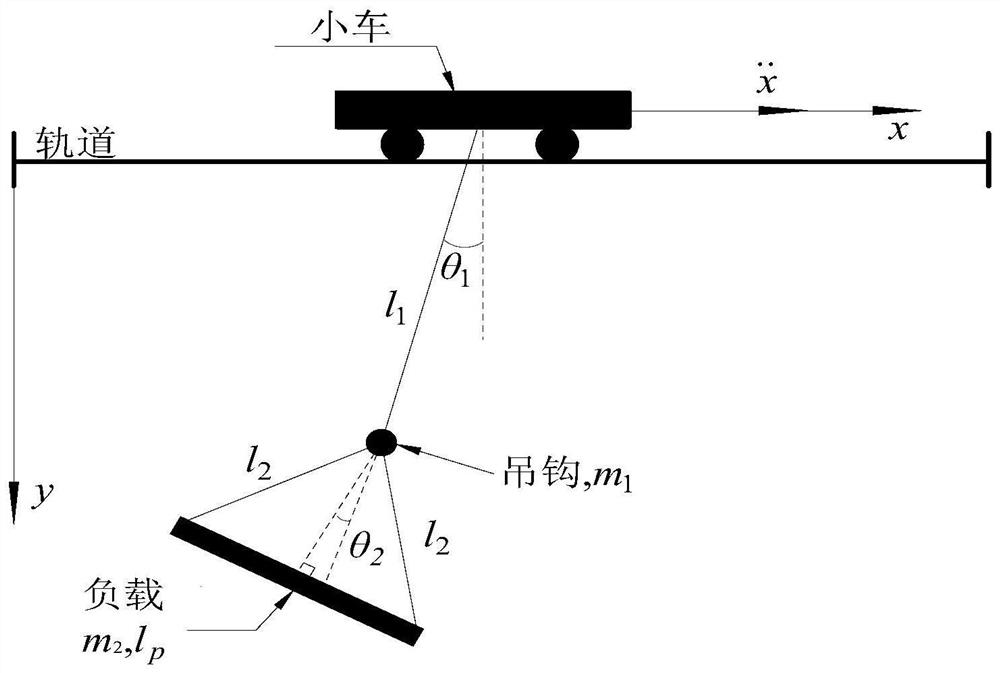
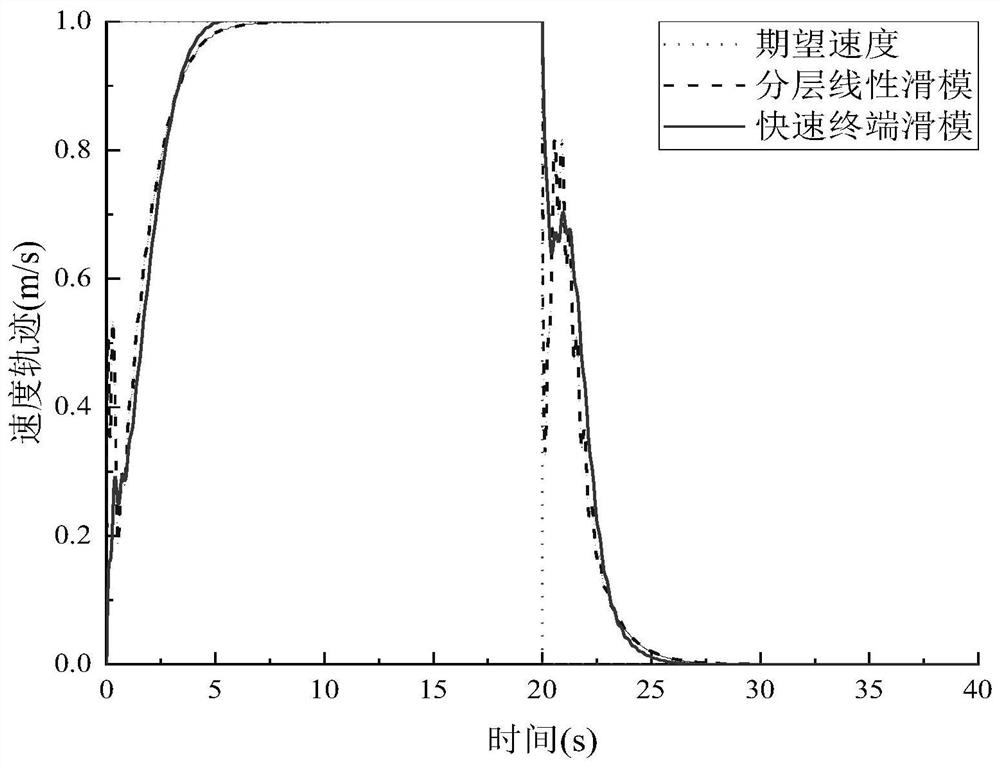
[0020] Based on the Lagrange dynamics analysis method, the invention establishes the state equation of the double pendulum system of the distributed mass load crane. Consider velocity control as input to construct fast terminal sliding surfaces for the trolley, hook, distributed mass load, and hoist subsystems. Using the equivalent sliding mode control method, the control models of the trolley and the hoisting mechanism composed of equivalent control and switching control are respectively obtained. At the same time, the sign function in the control model is replaced by a saturated function to avoid high-frequency oscillation. And the stability of the designed system is proved by Lyapunov method. The crane anti-sway control system can realize the anti-sway control when the trolley or cart and the hoisting mechanism are running at the same time, which can significantly impr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More