

Close-range photogrammetry target positioning method and system with known camera station position
A technology of close-range photography and target positioning, applied in the direction of photo interpretation, etc., can solve the problems of complex data processing, slow operation progress, heavy workload, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0069] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
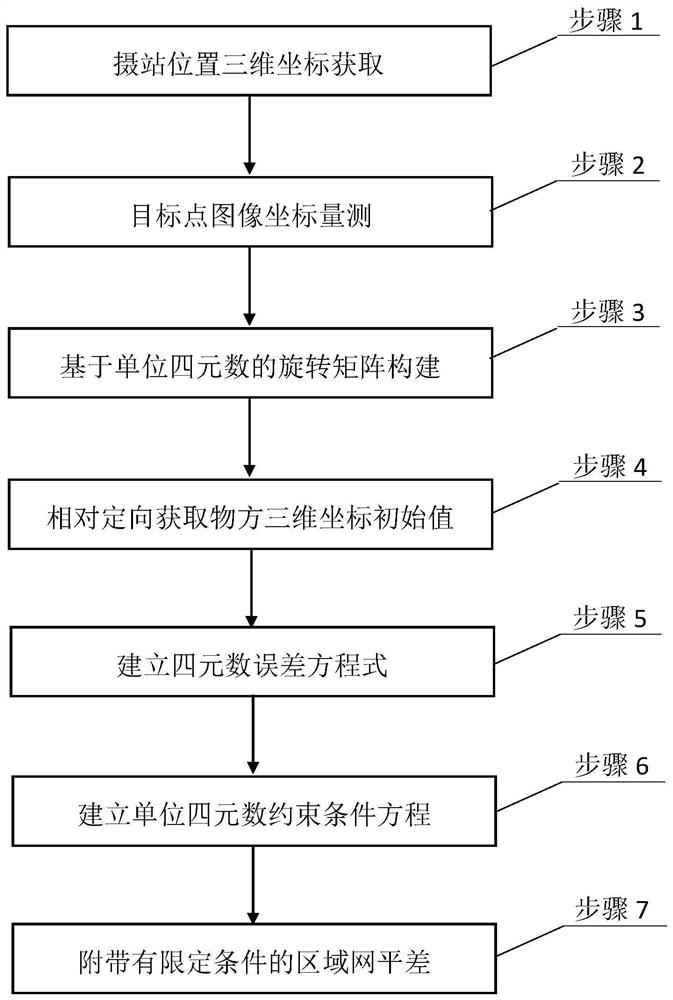
[0070] like figure 1 As shown, the embodiment of the present invention provides a close-range photogrammetry target positioning method with a known photographic position, which can realize target positioning without image control points, including the following steps:
[0071] Step 1. Obtain the three-dimensional coordinates of the camera station position;
[0072] During specific implementation, the three-dimensional coordinates of the shooting station during image shooting can be obtained through existing measurement methods.
[0073] The preferred implementation method adopted in the embodiment is to connect the photogrammetry camera and three total reflection prisms with a rigid body to ensure that the relative distance between the camera and the three prisms remains unchanged. The geometric distance of the prism is cal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More