

Consistent point drift registration method based on high-dimensional expression
A base point and registration technology, applied in image data processing, instrumentation, calculation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
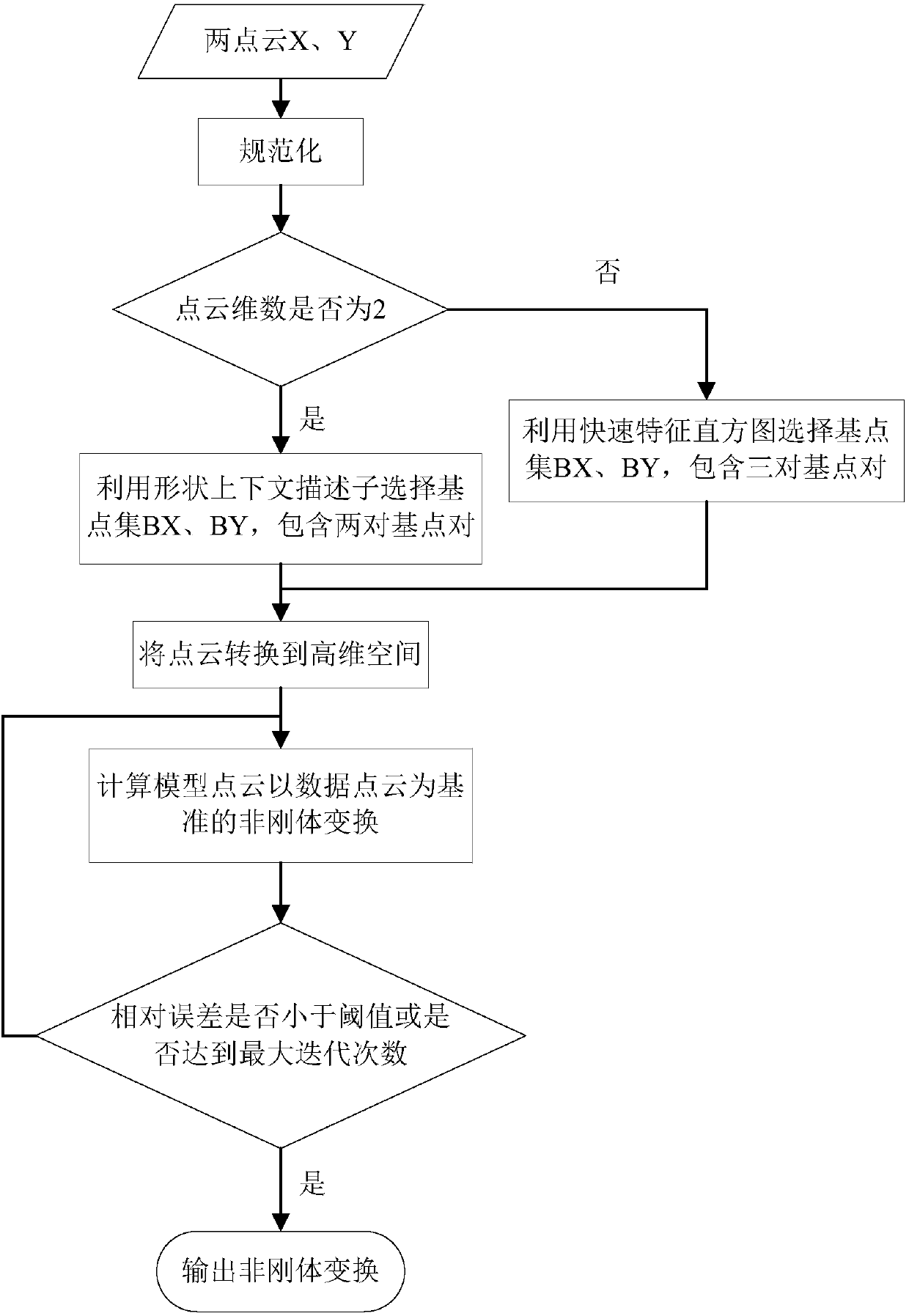
[0092]In this embodiment, the fish model data set is used for experiments. The hardware configuration is 3.4GHz Inter Core i3 CPU, 4GB RAM, and the experimental platform is MATLAB (R2014a).
[0093] 1) Normalize the two point clouds collected from the fish model dataset respectively; the two point clouds are: data point cloud X N×D =(x 1 ,...,x N ) and model point cloud Y M×D =(y 1 ,...,y M );
[0094] Among them, D represents the point cloud dimension, N represents the number of data point clouds; M represents the number of model point clouds;
[0095] 1.1) Solve the mean value of the data point cloud separately and standard deviation σ x and the mean of the model point cloud and standard deviation σ y ;
[0096] 1.2) Subtract the mean value from the coordinates of the data point cloud and the model point cloud respectively and divide by the standard deviation. The processed data point cloud is: The model point cloud is
[0097] 2) Select two base point sets...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More