

Prostate biopsy puncture robot based on ultrasonic image guidance
An ultrasound image and prostate technology, applied in the field of medical devices, can solve problems such as restrictions on prostate cancer screening, complications in patients, complex environments, etc., and achieve the effects of increased control difficulty, simple structure, and simple microbial environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
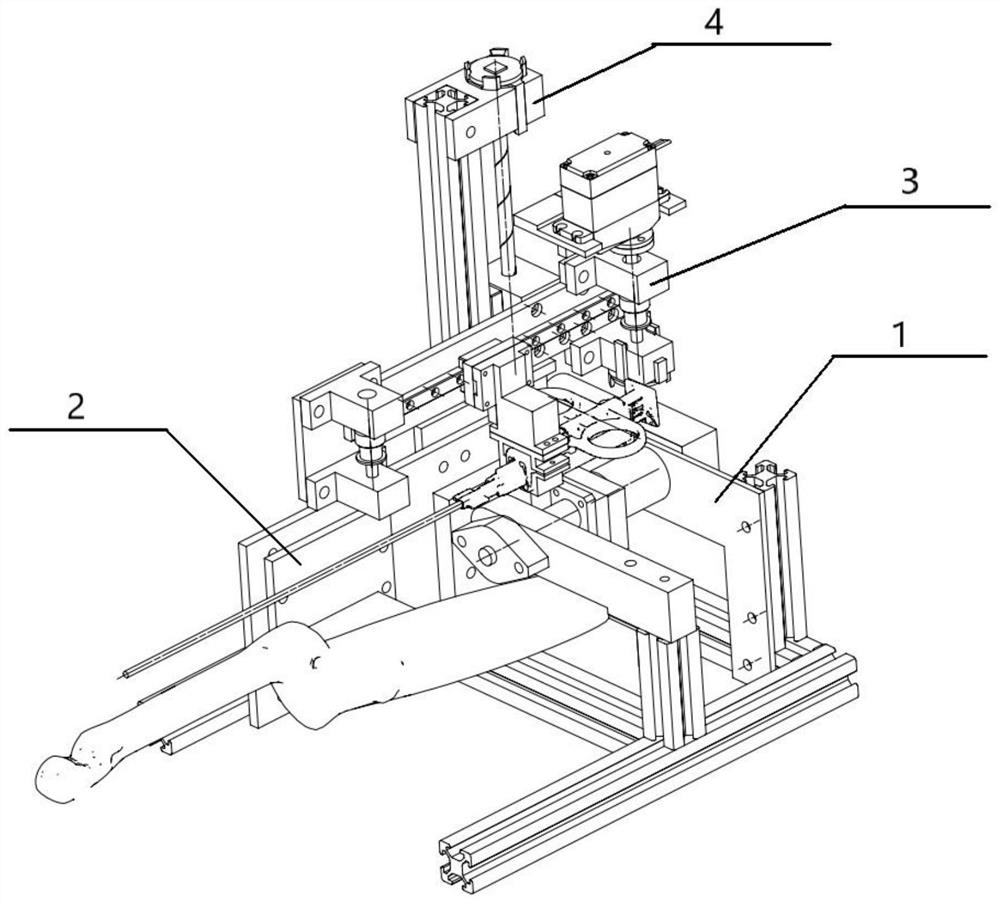
[0021] Such as figure 1 As shown, it is a prostate biopsy puncture robot based on ultrasound image guidance related to this embodiment, which includes: used to control the ultrasonic probe fixing mechanism, vertical position adjustment mechanism, and puncture actuator except for the base. The angle control mechanism 1 for the axis angle of the probe, the ultrasonic probe fixing mechanism 2 for installing and clamping the ultrasonic probe, which is connected with the angle control mechanism 1 through the connecting plate, and is used to control the position of the puncture actuator and finally control the puncture needle The vertical position adjustment mechanism 3 relative to the axial distance of the ultrasonic probe, which is connected to the connecting plate through its own flange connection, and then controlled by the angle control mechanism 1, is used to clamp the puncture needle and finally drive the puncture needle to penetrate the patient Inside the body, the piercing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More