

Commercial vehicle driving neutral position self-learning method
A self-learning, commercial vehicle technology, applied in the field of mid-position self-learning of commercial vehicle driving, can solve the problems of left and right serpentine, unstable steering wheel, driver's driving fatigue, etc., to eliminate detection errors, improve driving feel, and reduce driving burden Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
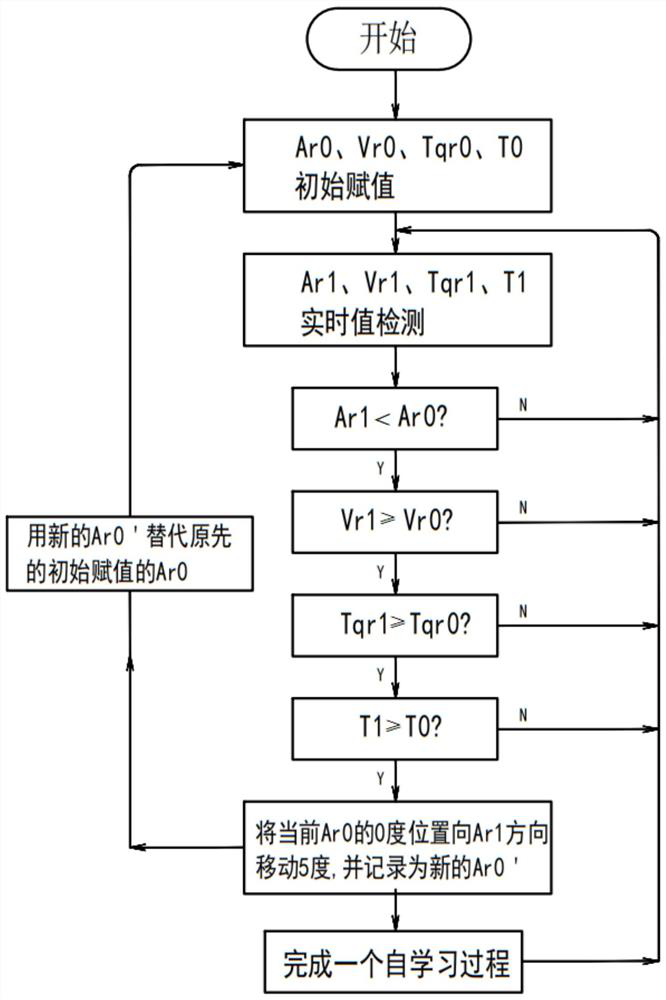
[0043] This example is mainly divided into two parts: vehicle running bias detection; medium self-learning.
[0044] The first part of the vehicle running offset detection method is as follows:
[0045] Before driving, the initial steering wheel corner AR0, the initial vehicle speed VR0, the initial steering wheel torque Tqr0, the initial torque duration T0, the initial torque duration T0 are pre-set, and recorded.
[0046] Where: Ar0 (calibrate the initial steering wheel corner);
[0047] VR0 (calibration speed);
[0048] TQR0 (calibration initial steering wheel torque)
[0049] T0 (calibration of the initial torque duration)
[0050] After the vehicle starts driving, real-time detection of the real-time steering wheel corner AR1, real-time vehicle speed VR1, real-time steering wheel torque TQR1, real-time torque duration T1.
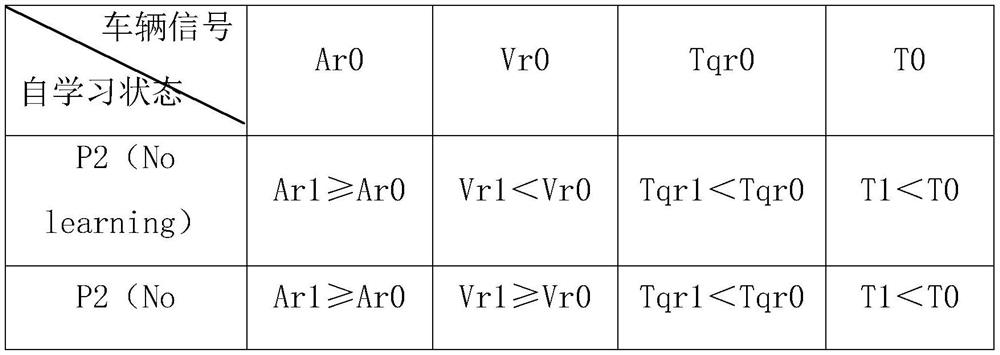
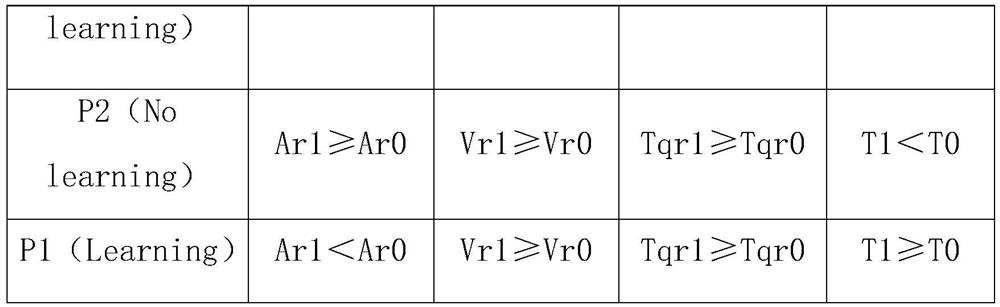
[0051] Medium self-learning status includes p1 (Learning), P2 (no learning).
[0052] The main determination conditions for entering the median self-learn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More