

Environment-friendly cluster suspension type seabed ore collecting robot and ore collecting method
An environment-friendly and robotic technology, applied in neural learning methods, mineral mining, earth drilling and mining, etc., can solve problems such as low operating efficiency, poor reliability, and large environmental disturbances, and achieve improved efficiency, avoiding reciprocating operations, and high acquisition rate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049]The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0050] 1) Structure:
[0051] 1. Cluster design of deep sea mining robots
[0052] A mine collection system includes multiple seabed mining robots, which work independently and synchronously. The mining robots are small in size and highly mobile, and will not affect each other, saving time and improving the efficiency of collection.
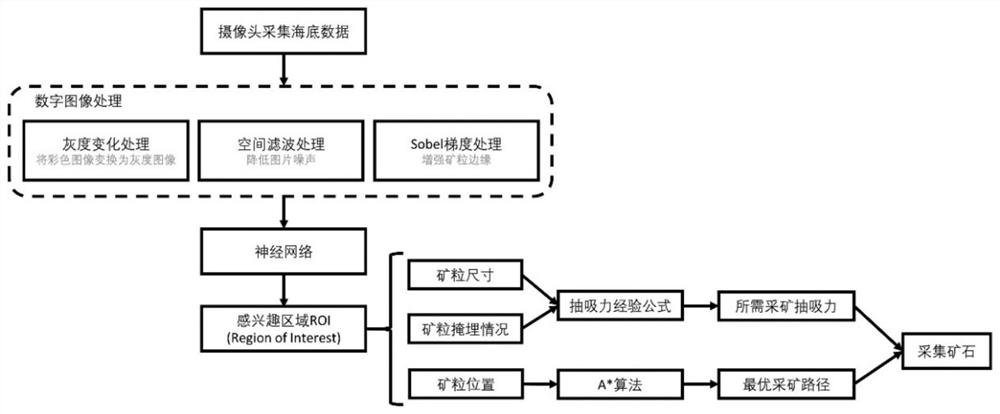
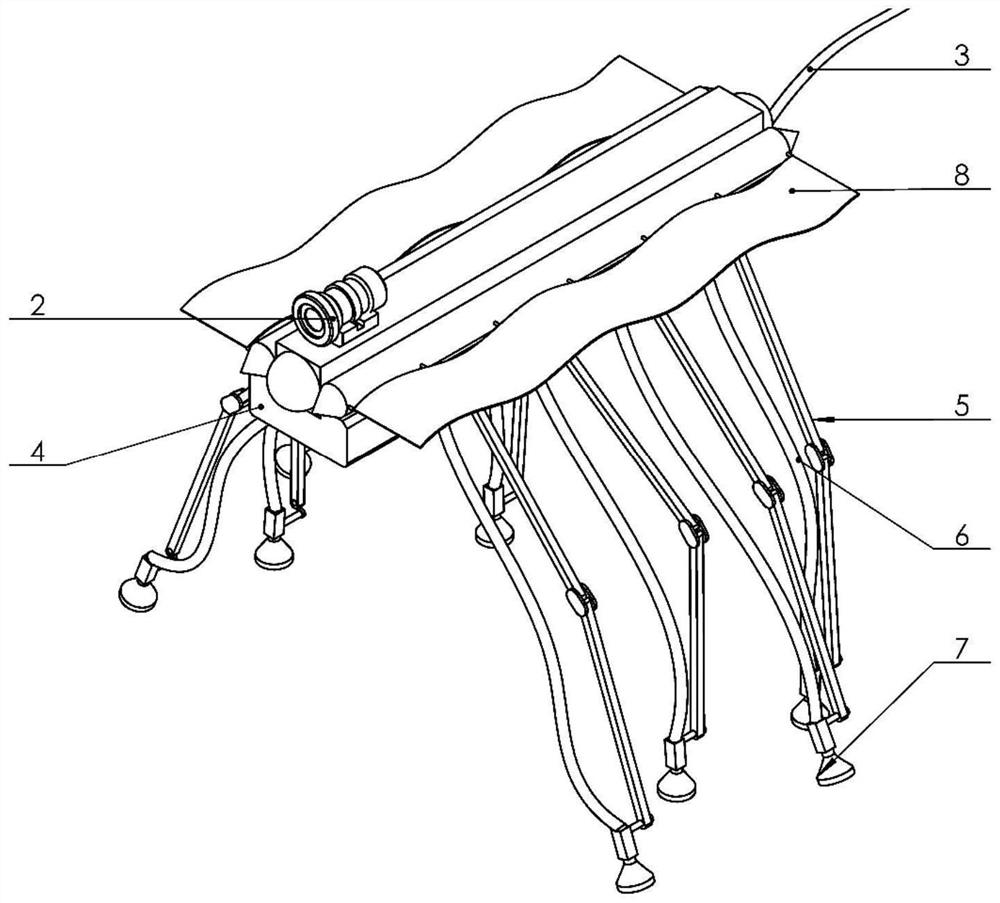
[0053] 2. The mining robot is composed of a recognition unit, a decision-making unit, a mobile unit, and a collection unit.
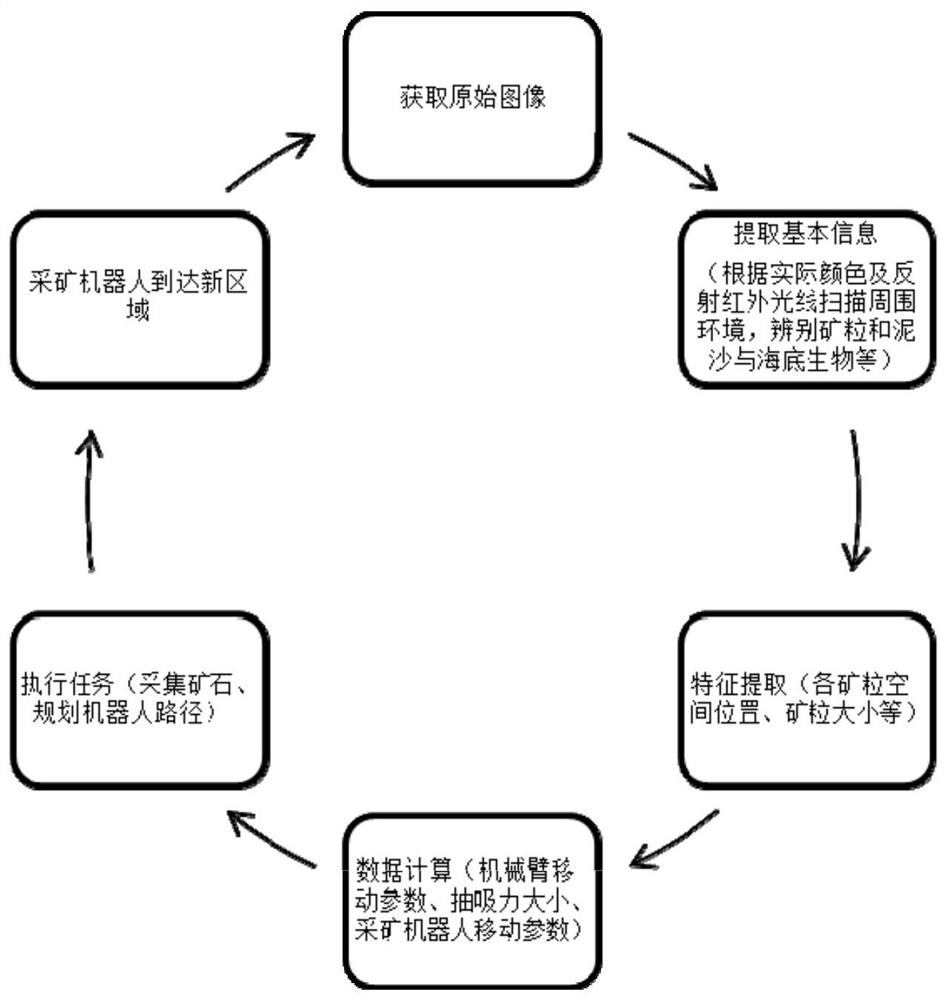
[0054] The identification unit scans the surrounding environment of the robot, extracts the environmental data information, and uploads it to the decision-making unit; the decision-making unit processes the data through algorithms and formulas, and obtains and sends corresponding instruction parameters to control the action of the mining robot; the acquisition unit It is the execution modu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More