

Space robot trajectory planning method based on sequence convex optimization
A space robot and trajectory planning technology, which is applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve the problems of free-floating space robots that have not been studied in depth, and achieve the goal of improving convergence speed, good real-time performance, and improved convergence Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
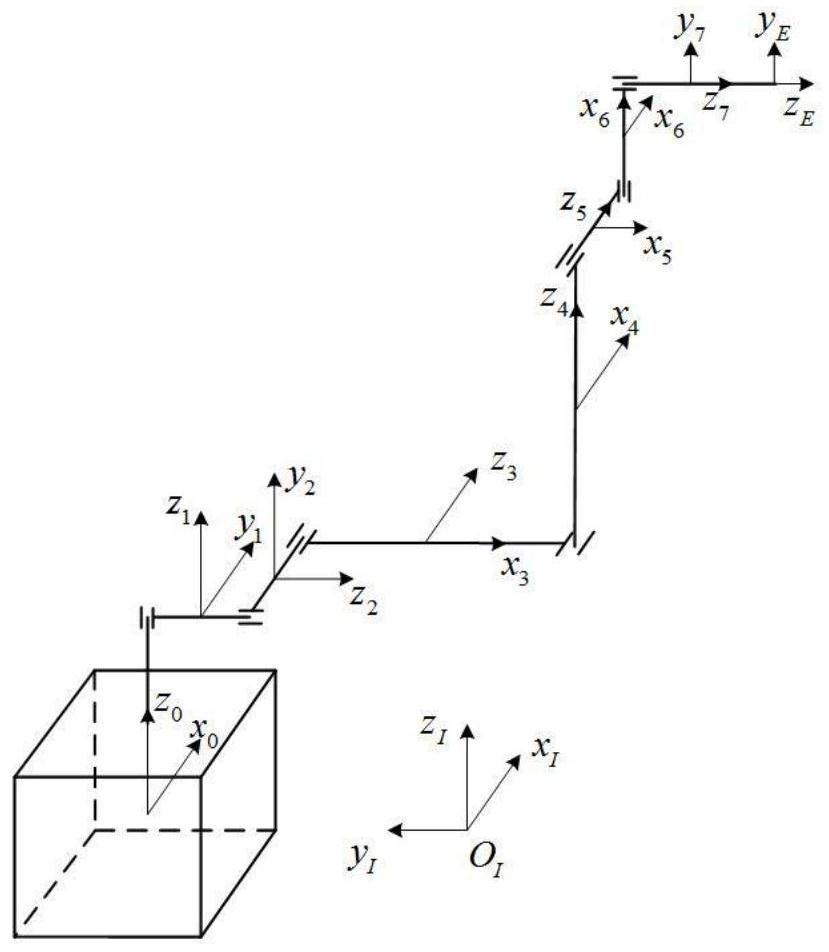
[0230] The simulation object of the present invention is a space robot with 7 joints, and the configuration of the system manipulator refers to the Canadian No. 2 manipulator, such as figure 1 The physical parameters of the system are shown in Table 4. Without loss of generality, it is assumed that the initial linear momentum and angular momentum of the system are zero, and the initial position of the center of mass of the base is selected as the origin of the inertial reference system. The origin O of the conjoined coordinate system of the base 0 Taken at the center of mass of the base, the coordinate axis is in the same direction as the principal axis of inertia. Assuming the joint coordinate system O of the base in the initial state 0 -x 0 the y 0 z 0 and inertial coordinate system O I -x I the y I z I are coincident.
[0231] Table 4 Dynamic parameters of space robot
[0232]
[0233] At the initial moment, the end position of the space robot is P e0 =(0,0,0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More