Transverse and longitudinal coupling pneumatic type multi-finger soft manipulator
A technology of manipulators and software, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve problems such as low load capacity, low working air pressure, and inability to grab large-sized objects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The structure and features of the present invention will be described in detail below in conjunction with the drawings and embodiments. It should be noted that various modifications can be made to the embodiments disclosed herein, therefore, the embodiments disclosed in the specification should not be regarded as limitations on the present invention, but only as examples of embodiments, and its purpose is to make the present invention The features of the invention are self-evident.
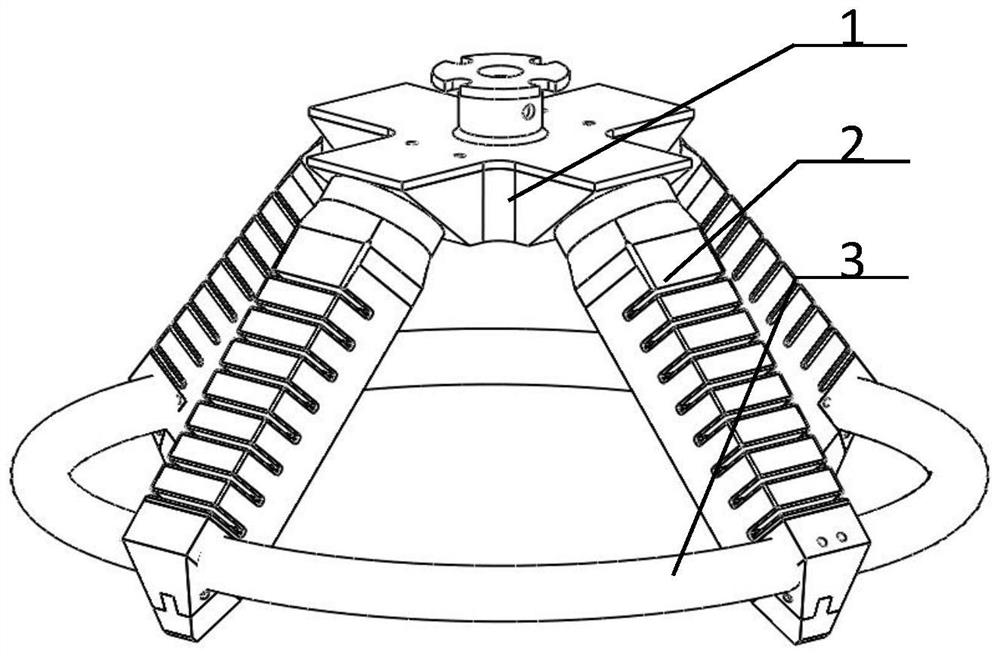
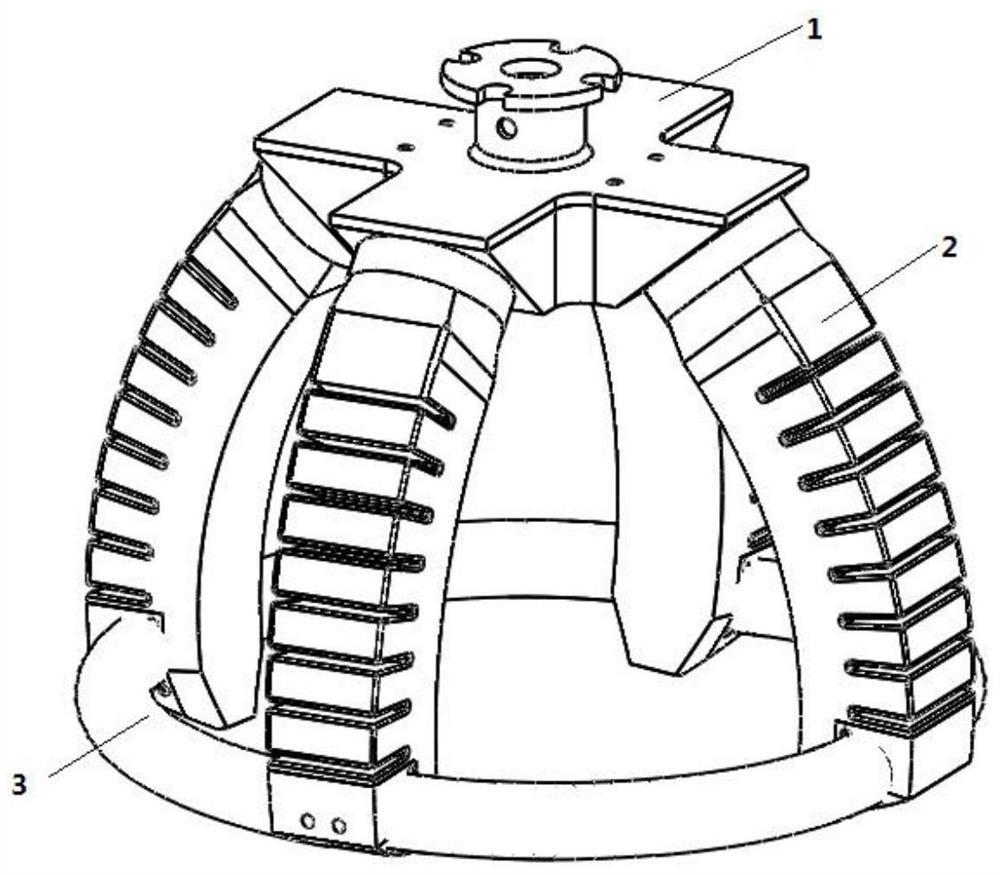
[0035] Such as figure 1 , figure 2 As shown, the horizontal and vertical coupling pneumatic multi-finger soft manipulator provided by the present invention includes a rigid cage 1, several flexible finger modules 2 and several segmented strip-type retractable drivers 3. The bendable finger modules 2 are uniformly installed and fixed on the rigid cage 1 in the circumferential direction, and a long stretchable driver 3 is connected between the finger ends of two adjacent bendable finger mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com