

Mobile robot mine scene reconstruction method and system based on SLAM
A mobile robot and scene reconstruction technology, applied in the field of mobile robot mine scene reconstruction, can solve the problems of inability to obtain object color information, inaccurate measurement data, inaccurate data collection of lidar and visual sensors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
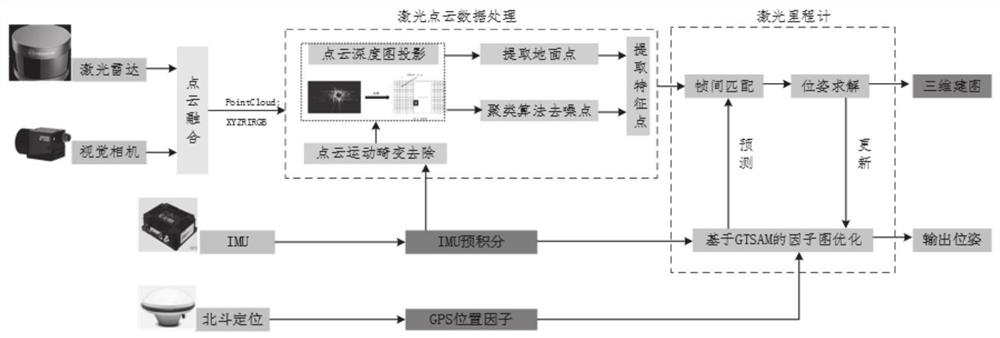
[0049] Such as figure 1 As shown, Embodiment 1 of the present disclosure provides a SLAM-based mobile robot mine scene reconstruction method, including the following process:
[0050] S1: Synchronize and calibrate laser point cloud and visual point cloud by using time stamp, and define a new data structure to realize point cloud data fusion.
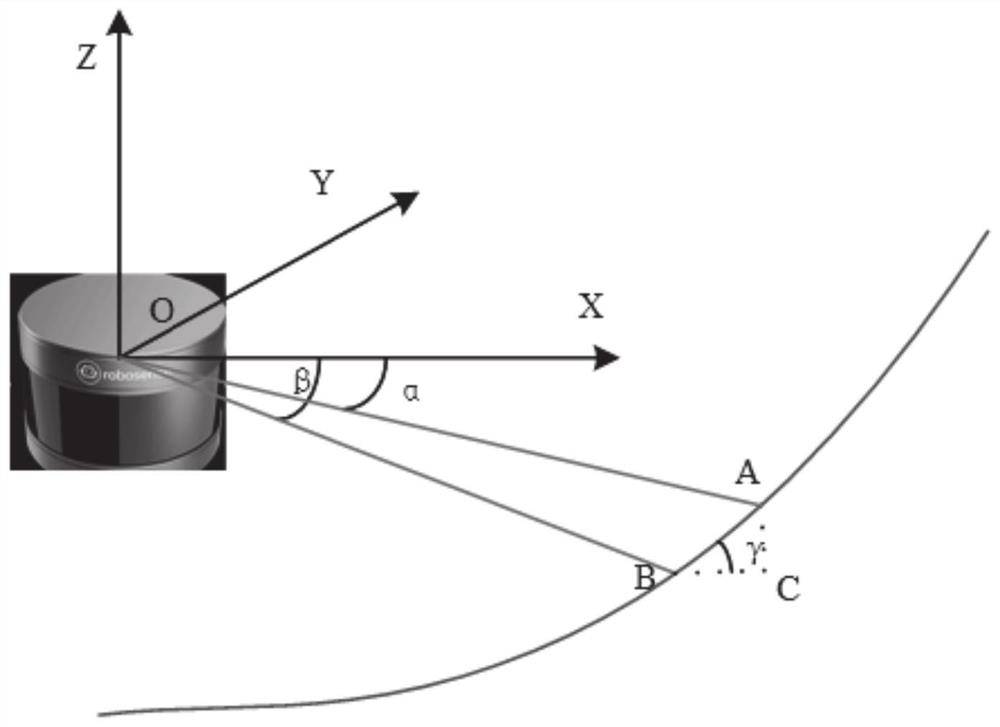
[0051]S2: Use the multi-line laser radar and IMU fusion to remove the motion distortion of the laser point cloud and filter the point cloud for the mine scene;
[0052] S3: Using a multi-constraint factor graph algorithm based on graph optimization, IMU, laser radar, GNSS, and other constraint information are added to the constraint subgraph to realize back-end loopback detection and map building.
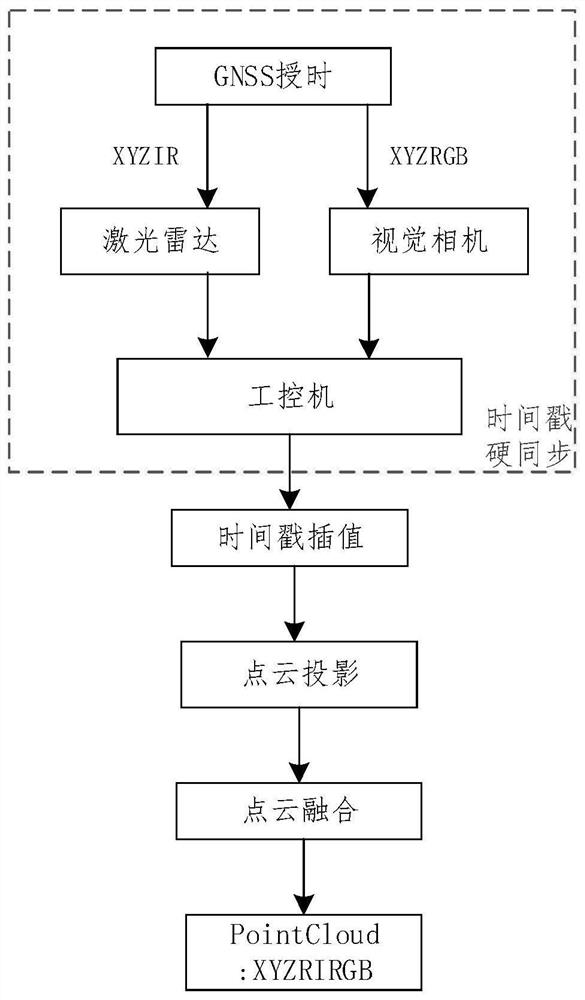
[0053] In S1, it mainly includes the following contents:
[0054] Synchronize and calibrate the laser point cloud and visual point cloud by using the timestamp, and define a new data structure to achieve point cloud data fusion, such as f...
Embodiment 2
[0076] Embodiment 2 of the present disclosure provides a SLAM-based mobile robot mine scene reconstruction system, including:
[0077] The data acquisition module is configured to: acquire synchronously calibrated laser point cloud data and visual point cloud data measured by the mobile robot;
[0078] The point cloud fusion module is configured to: fuse the acquired laser point cloud data and visual point cloud data;
[0079] The point cloud data processing module is configured to: perform point cloud motion distortion removal processing and point cloud filtering processing on the fused point cloud data;
[0080] The 3D map reconstruction module is configured to: combine the processed point cloud data, adopt a multi-constraint factor graph algorithm based on graph optimization, add IMU pre-integration data, point cloud key frame data and GNSS data into the constraint subgraph, and perform loop closure detection Then get the reconstructed 3D map.
[0081] The working method ...
Embodiment 3
[0083] Embodiment 3 of the present disclosure provides a computer-readable storage medium on which a program is stored, and when the program is executed by a processor, the steps in the method for reconstructing a mine scene based on SLAM for a mobile robot as described in Embodiment 1 of the present disclosure are implemented. .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More