

Automated laboratory machine for automatic handling of laboratory samples
An automatic processing and laboratory technology, applied in the direction of laboratory utensils, instruments, chemical instruments and methods, etc., can solve the problem of tight placement area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
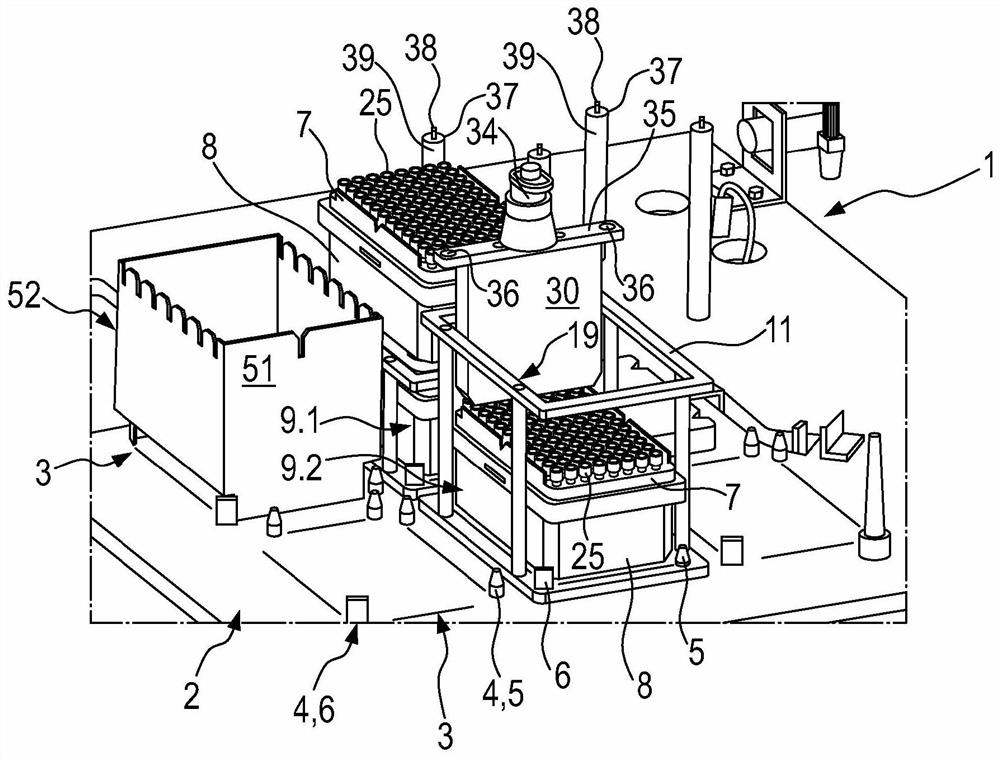
[0069] according to figure 1 , the laboratory robot 1 has a plurality of work stations 3 for standardized microtiter plates on a flat work area 2 (work plate). Correspondingly, each working station 3 has dimensions adapted to the bottom surface of a standardized microtiter plate.
[0070] Each working position 3 is defined by an assembly of first orientation elements 4 formed by four first pins 5 fixedly connected to the working area and a first spring element 6 . Two first pins 5 are arranged at the ends of one long side and one short side of the work station next to one corner of the work station. The first spring element 6 is arranged on the corner of the working position diametrically opposite the corner. Adjacent to said long side and short side of the work station 3, a further first pin 5 is arranged next to the other corner.
[0071] In this example, the laboratory robot has six work positions 3 .
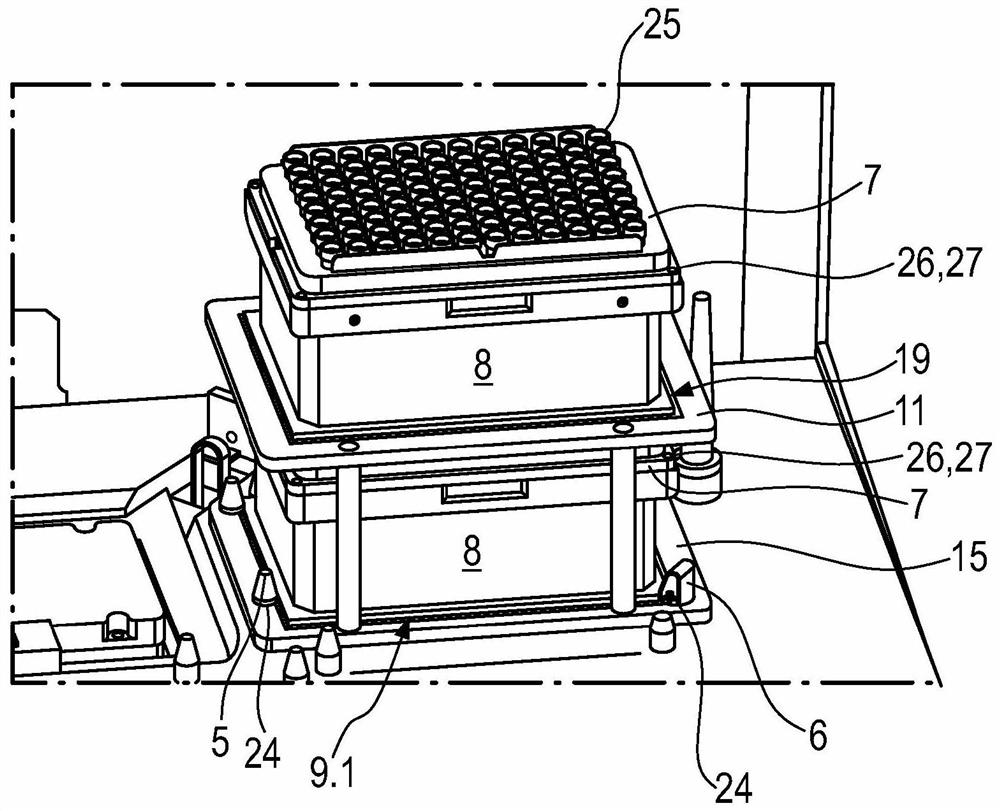
[0072] A standardized microtiter plate surrounded by first orientat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More