

Underwater robot applied to bridge pier maintenance and maintenance method thereof
An underwater robot and robot technology, which is applied in the directions of underwater ships, bridge maintenance, underwater operation equipment, etc., can solve the problems of large unstable workload, complex flow field, and difficulty in ensuring the stable operation of the mechanical arm.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
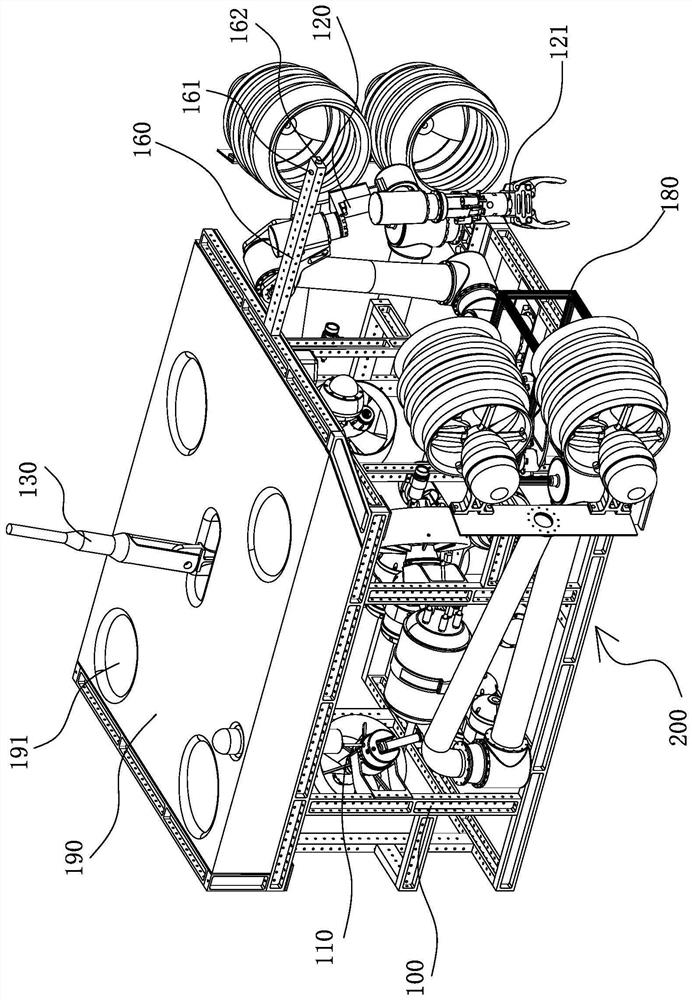
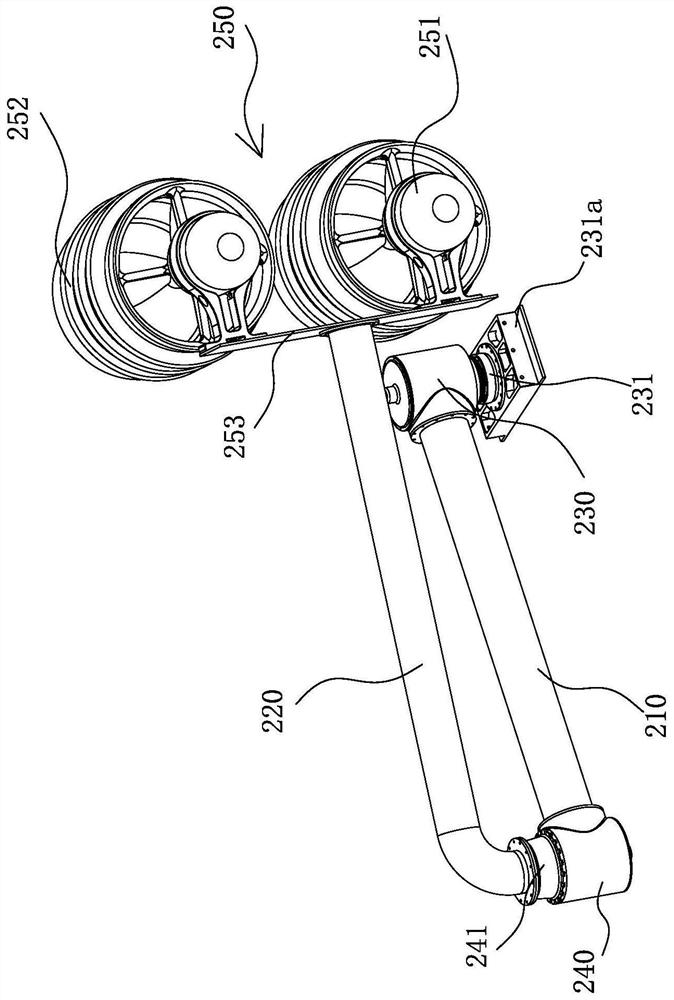
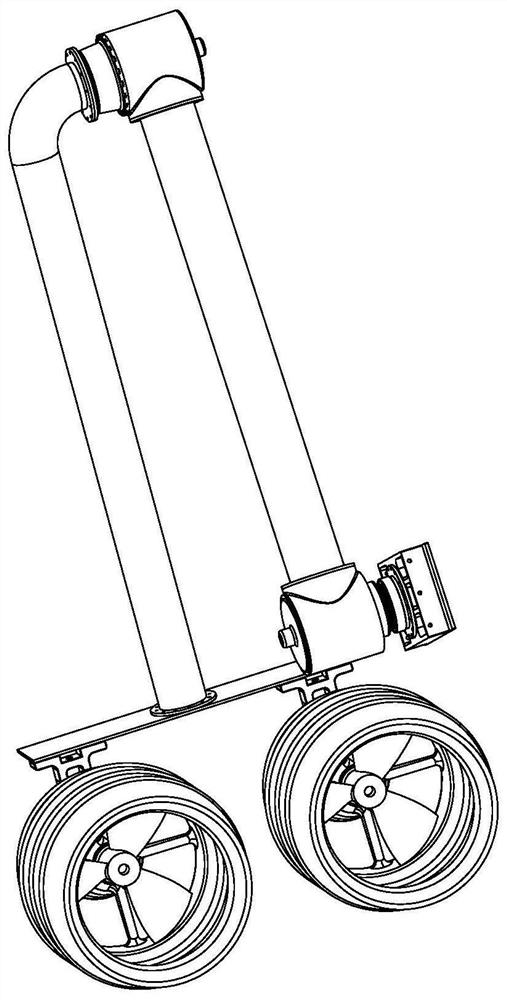
[0040] Such as figure 1 — Figure 4 As shown, in this embodiment, an underwater robot applied to bridge pier maintenance includes a frame 100 , a wall-holding mechanism 200 , a first thruster 110 and a mechanical arm 120 .
[0041]One end of the frame 100 is provided with a pair of wall-holding mechanisms 200, each wall-holding mechanism 200 can rotate relative to the frame 100, each wall-holding mechanism 200 can be adsorbed on the pier, and a plurality of first propellers 110 are all arranged on the frame 100 Inside, the mechanical arm 120 is installed on one end of the frame 100, the mechanical arm 120 is located between two wall-holding mechanisms 200, the frame 100 is provided with a floating plate 190, and the floating plate 190 is provided with a plurality of push holes 191, each A third propeller (not marked) is arranged in the push hole 191, and the specifications and sizes of the third propeller and the first propeller 110 are the same. Further, the first propeller ...
Embodiment 2
[0050] Such as figure 1 — Figure 4 As shown, the present embodiment is a maintenance method for an underwater robot applied to bridge pier maintenance, including:
[0051] Step 1. Place the underwater robot in the water area to be detected, and the operator checks the searchlight 170 and the camera 140, and tests whether the power supply of the underwater robot is normal;
[0052] Step 2, start the underwater robot, and control the balance state of the underwater robot underwater by manipulating the first thruster 110;
[0053] Step 3. Through the navigation cabin 320 of the underwater robot, operate the underwater robot to move to the work site according to the planned path. When the underwater robot moves to the work site, the camera 140 and the second sonar 150 will transmit the real-time images through the transmission head 130 Pass to the receiver of the underwater robot, so that the operator can judge whether the arrival area has reached the pier area to be detected, ...
Embodiment 3
[0061] In this embodiment, a step is added in step 4 of the second embodiment.
[0062] Specifically, when the water quality is turbid and the camera 140 cannot acquire a clear picture, the second sonar 150 is turned on to acquire a real-time picture of the pier surface.
[0063] It should be noted that all directional indications (such as up, down, left, right, front, back...) in the embodiments of the present invention are only used to explain the relationship between the components in a certain posture (as shown in the accompanying drawings). Relative positional relationship, movement conditions, etc., if the specific posture changes, the directional indication will also change accordingly.
[0064] In addition, in the present invention, descriptions such as "first", "second", "one" and so on are used for descriptive purposes only, and should not be understood as indicating or implying their relative importance or implicitly indicating the indicated technical features quan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More