Automobile prediction cruise parameter self-tuning control system based on fusion of driving mode information
A parameter self-tuning and driving mode technology, applied in the direction of control devices, etc., can solve the problems of not applying the cruise control system and not involving the weight parameter self-tuning, so as to reduce manpower, improve fuel economy, and reduce fuel consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
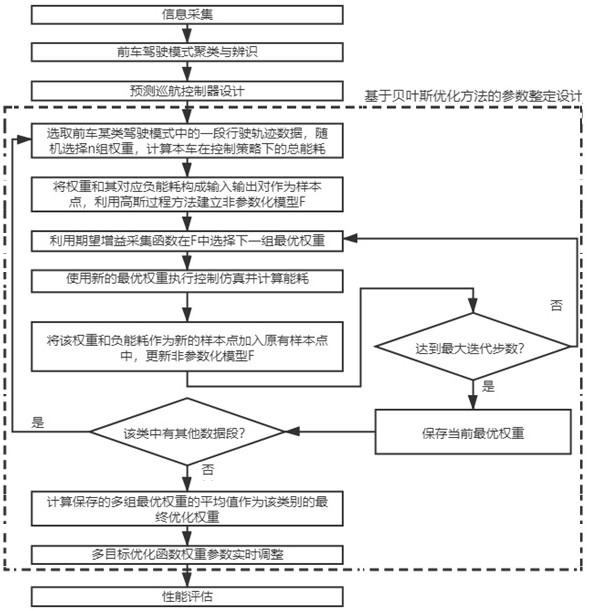
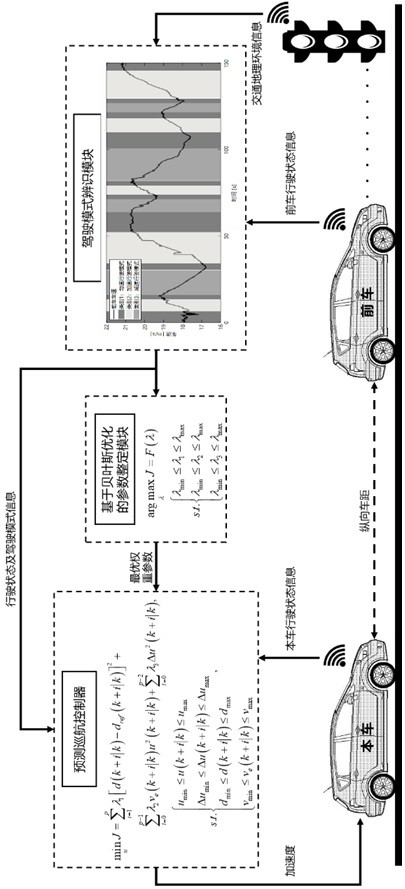
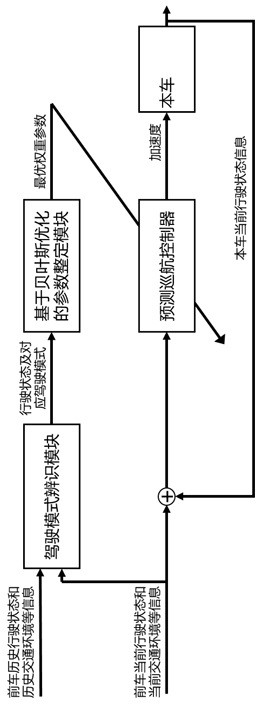
[0055] The present invention considers the cruising and car-following scene. The system first uses a clustering algorithm to identify the driving mode of the preceding vehicle based on rich multi-source heterogeneous network information; The Yeasian optimization method automatically tunes the weight parameters in the multi-objective optimization function, and obtains the optimal weight parameters that minimize the energy consumption of the vehicle in a certain driving mode of the preceding vehicle. Finally, based on the current driving mode identification of the preceding vehicle Results The weight parameters adjusted were used to adjust the weight parameters of the multi-objective optimization function in the PCC system of the vehicle, so as to achieve the goal of further improving the fuel economy of the vehicle when the vehicle was cruising and following the vehicle.
[0056] The present invention is achieved through the following technical solutions:
[0057] 1. Informatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com