Method for planning and tracking local obstacle avoidance path of autonomous vehicle
An automatic driving and path tracking technology, applied in vehicle position/route/height control, non-electric variable control, two-dimensional position/course control, etc., can solve the problem of difficult ideal paths, real-time performance cannot be effectively guaranteed, and time-consuming and other issues to achieve the effect of ensuring traceability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
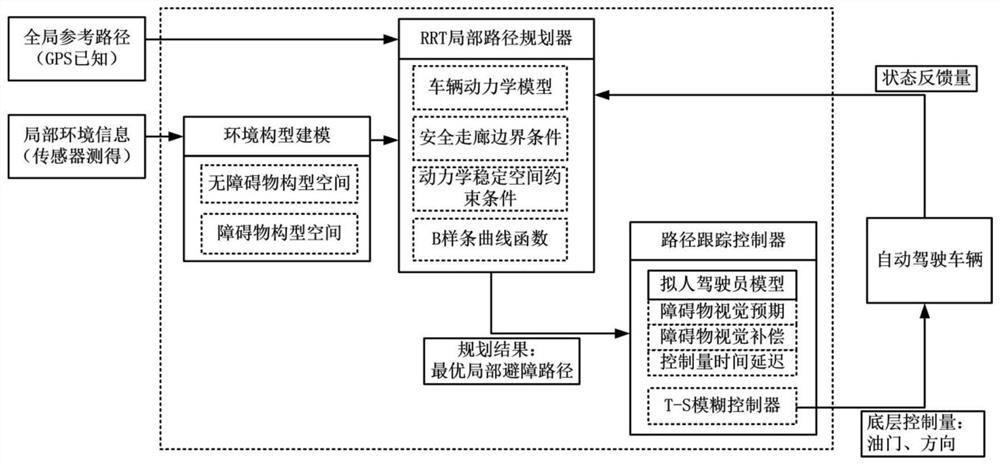
[0025] The following combination figure 1 And embodiment further illustrate the present invention.
[0026] First, the global reference path of the self-driving vehicle in the driving environment is obtained through GPS, and the local terrain and dynamic obstacle information of the vehicle can be obtained by the on-board sensor.
[0027] Then carry out environment modeling, and divide the surrounding local environment configuration space into obstacle configuration space and obstacle-free configuration space; at the same time, the irregular movement of dynamic obstacles in obstacle configuration space is given penalty The form is reflected in the calculation of the dynamic safety corridor range; then the established dynamic safety corridor range is used as the safety corridor boundary condition of the rapid search random tree algorithm RRT; the RRT algorithm is used to expand the constructed environment configuration space, and the vehicle The dynamic model is fused in the ex...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com