

Unmanned aerial vehicle self-balancing picking device based on lever principle and control method thereof
A lever principle, the technology of unmanned aerial vehicle, applied in the direction of picking machine, unmanned aerial vehicle, harvester, etc., can solve the problem of affecting the life time and flight safety of the drone, weight, affecting the balance of the drone, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
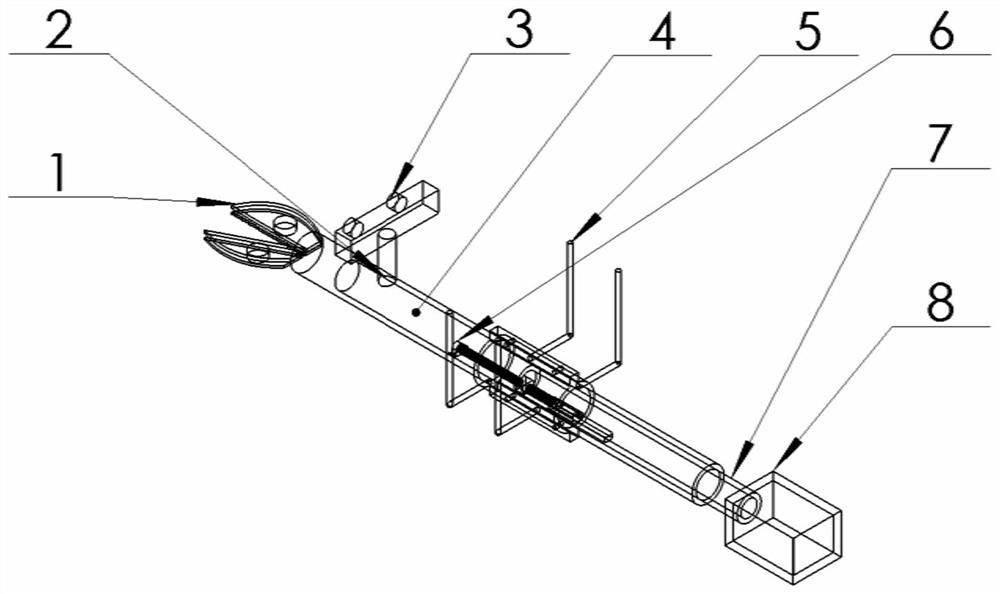
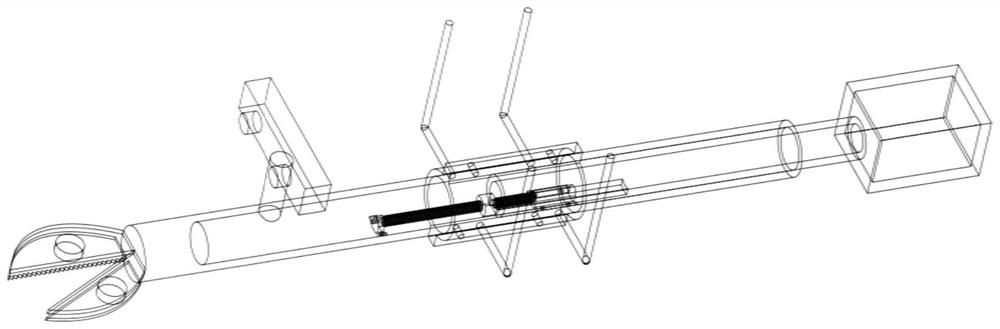
[0039] Such as Figure 1-Figure 3 As shown, the present embodiment is a kind of unmanned aerial vehicle self-balancing picking device based on the lever principle, including electric fruit picking device 1, camera fixing bracket 2, binocular vision camera assembly 3, front rod main body 4, connecting mechanism 5, ball screw Slide table 6, rear rod main body 7, weight box 8, scissors mechanism 9, weight sensor 10 and fruit branch clamping mechanism 11; Ball screw slide table 6 is set between described front rod main body 4 and rear rod main body 7, so One end of the ball screw slide table 6 is fixed on the front rod main body 4, and the other end is connected to the front end of the rear rod main body 7. When the ball screw slide table 6 moves, it drives the rear rod main body 7 to move telescopically.
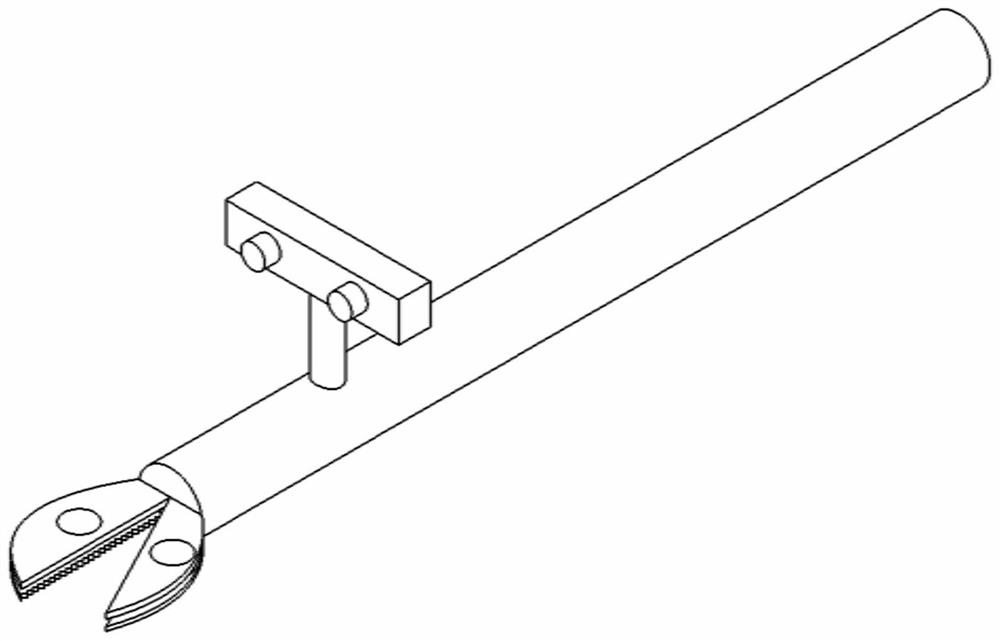
[0040] Further, such as Figure 7As shown, the front end of the front rod main body 4 is provided with an electric fruit picking device 1, and the electric fruit picking devic...
Embodiment 2
[0050] The present invention also provides a control method of a self-balancing picking device for unmanned aerial vehicles based on the principle of leverage, comprising the following steps:
[0051] (1) After installing the UAV fruit picking device, adjust the balance of the UAV. If the self-equipment cannot achieve balance, you can use the corresponding counterweight to place it in the counterweight box to make the UAV overall balanced.
[0052] After adjusting the balance, start the UAV, the UAV takes off, first conduct the inspection of the UAV equipment, and then carry out the fruit picking operation after the inspection is completed.
[0053] Position the fruit through the binocular vision camera, and the UAV controls the UAV to fly to the designated position through the flight control system. After arriving at the designated position, the UAV continuously scans the fruit through the binocular vision camera to adjust The position of the machine is such that the mother b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More