

Unmanned aerial vehicle initial flight path planning method for soil pollution boundary survey
A soil pollution and unmanned aerial vehicle (UAV) technology, which is applied in the field of UAV initial trajectory planning for soil pollution boundary survey, can solve the problems of not focusing on the initial trajectory planning and algorithm inapplicability, and increase the accuracy of soil pollution boundary survey The probability of avoiding mechanical loss and reducing the number of turns
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following specific examples will further describe the present invention in detail. The specific embodiments described here are only used to explain the present invention, not to limit the present invention.
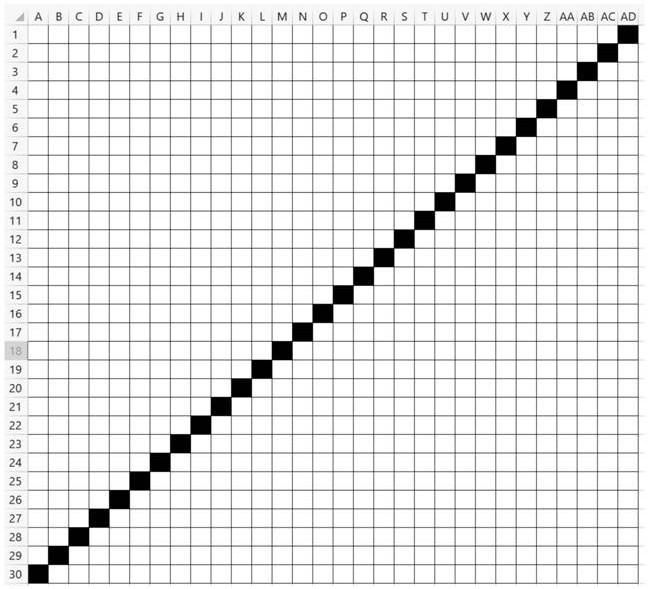
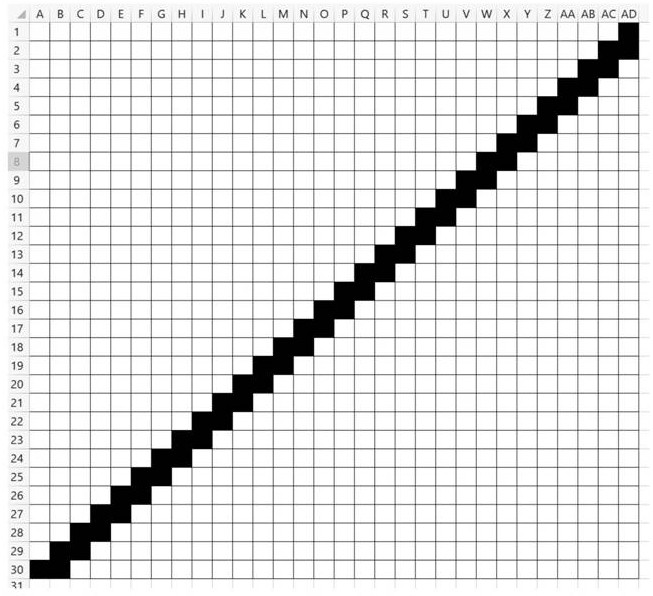
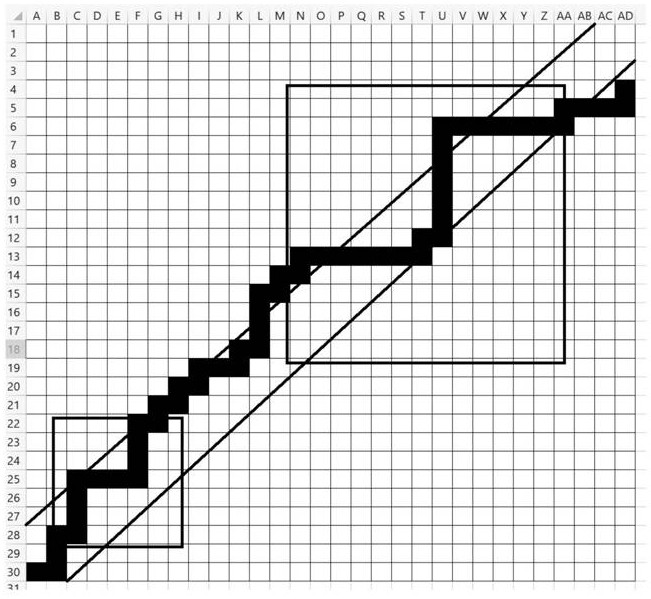
[0024] Figure 1 to Figure 4 The area to be surveyed is a 30*30 grid, and the drone flies over a grid to dye the grid. Assuming that the flying speed of the drone is the same, and the turning time is negligible compared with the time of flying through the grid, then the time of flying through each grid should be the same. The surveyed area can be intuitively obtained from the number of colored grids, and the flight time is positively correlated with the number of colored grids.
[0025] figure 1 It is the track map of flying straight along the diagonal in the area to be surveyed, which is the most common initial track planning method for UAVs; Excellent, because the latter way of flying around the border is very time-consuming. The advantages of direct fli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More