

Unmanned aerial vehicle cluster collaborative target searching method imitating biological group negotiation behavior
A target search and drone technology, applied in the field of autonomous control of drones, can solve problems such as low real-time performance and poor adaptability, and achieve the effects of improving control capabilities, good coordination, and improving search efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] The effectiveness of the method proposed by the present invention is verified below through a specific instance of UAV cluster co-location. The experimental computer configuration is Intel Core i7-7700HQ processor, 2.8Ghz main frequency, 8G memory, and the software is MATLAB 2018a version. The specific implementation process of the UAV swarm cooperative target search method imitating the biological group negotiation behavior is as follows: Figure 4 shown. Considering the existence of obstacles in the task scene, the inflection point coordinates of the four boundaries of obstacles are: boundary 1-(50,15),(50,21),(75,21),(75,65), (81,65),(81,15); Boundary 2-(15,15), (21,15), (21,65),(15,65); Boundary 3-(35,65), (55 ,65), (55,59), (35,59), boundary 4-(35,45), (55,45), (55,39), (35,39).
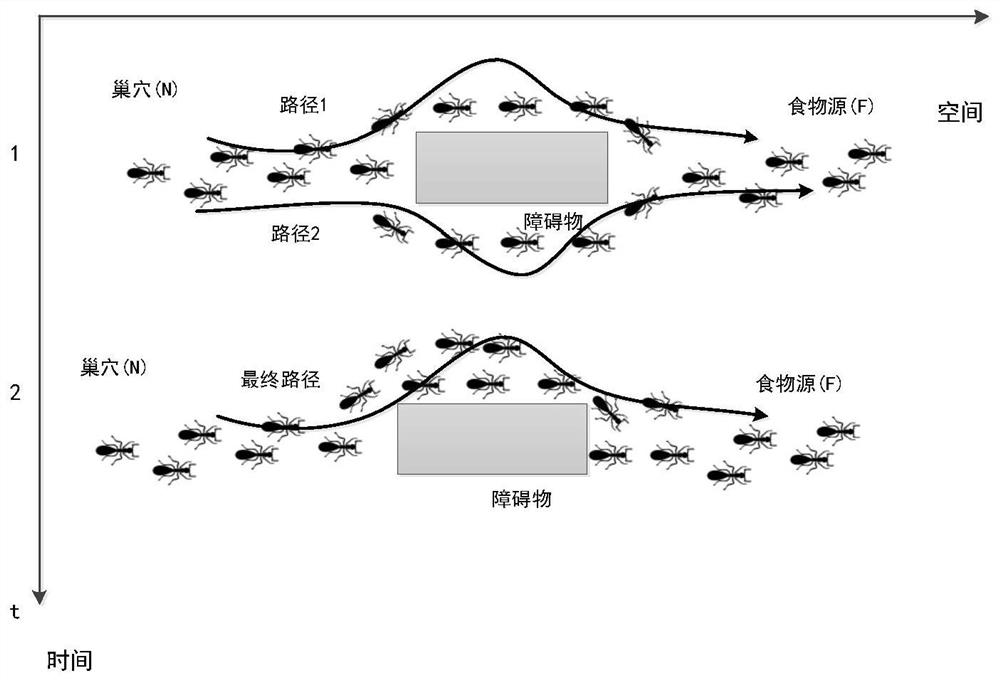
[0094] Step 1: Analysis of Ant Colony Foraging Behavior Characteristics and Optimizing Mechanism
[0095] As one of the key points in the simulation of ant colony foraging behavior, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More