

Deep reinforcement learning dual-arm robot control method based on demonstration examples, and system
A technology of reinforcement learning and control methods, applied in the direction of neural learning methods, program control manipulators, manipulators, etc., can solve the problems of unsatisfactory coordination and control of both arms, inability to receive positive rewards for both arms, and inability to carry out effective learning, etc. , to achieve the effect of improving control effect, maximizing performance, and solving exploration problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
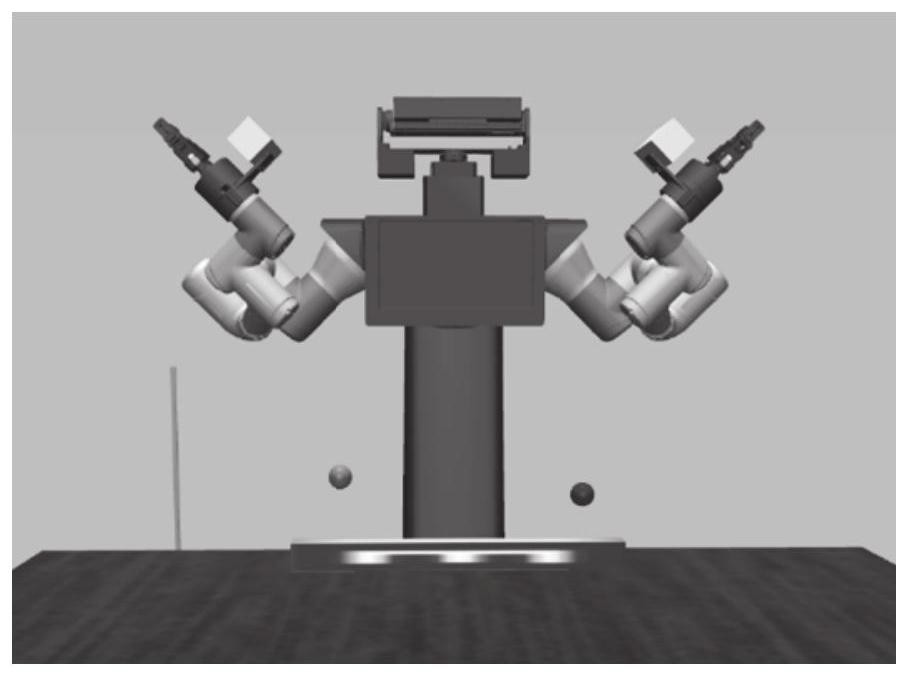
[0047] Such as Figure 1-10 As shown, the deep reinforcement learning dual-arm robot control method based on the demonstration example includes the following steps:
[0048] Obtain the initial coordinates of the end gripper of the dual-arm robot, the initial coordinates of the target object and the final coordinates of the target object;
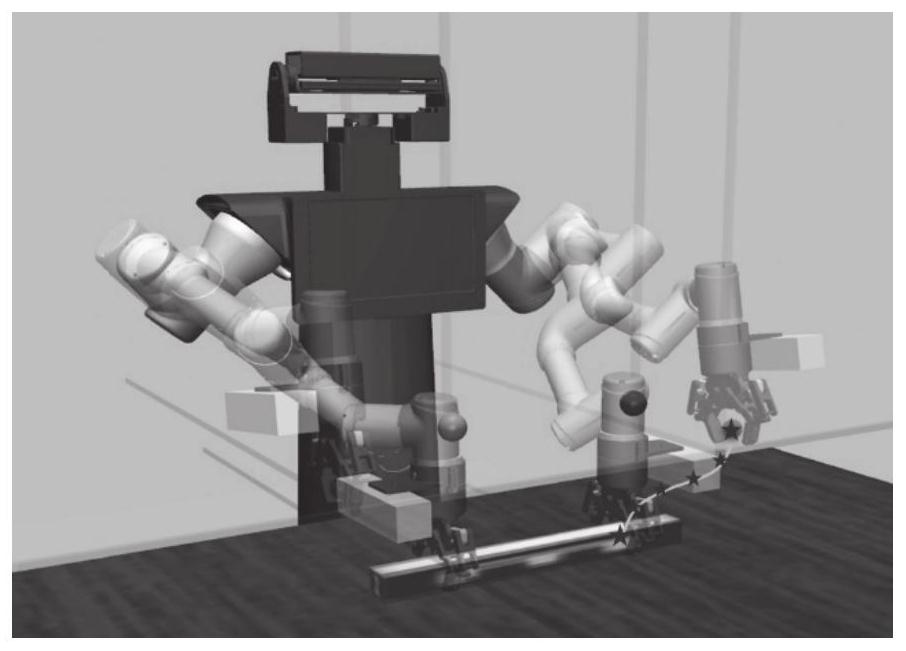
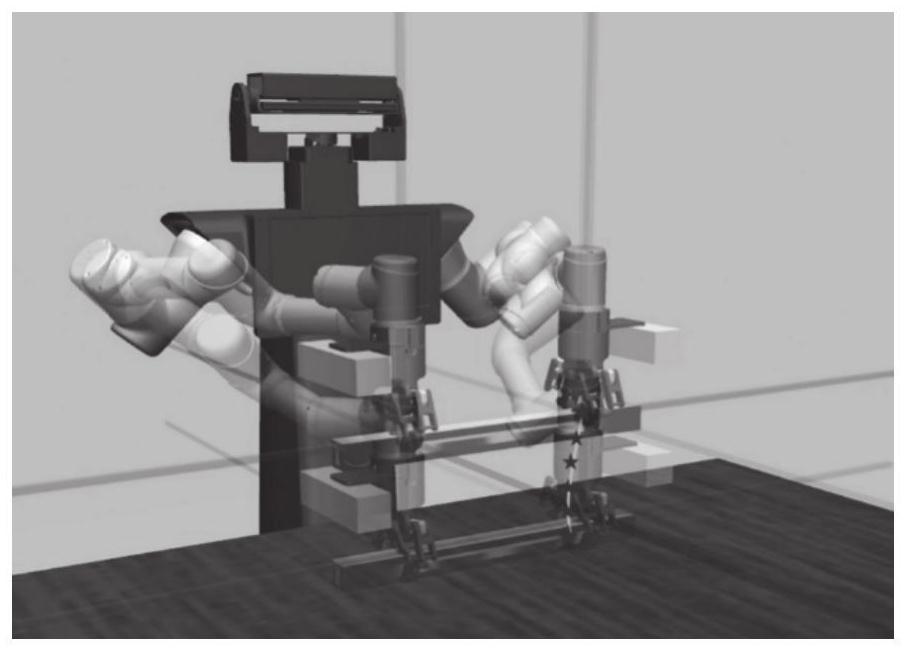
[0049] Based on the shortest distance between the initial coordinates of the end gripper of the dual-arm robot and the initial coordinates of the target object, the three-dimensional coordinate motion increment and coordinate change coefficient of the position of the end gripper of each group of manipulators are obtained to form the first teaching method. a demonstration example;
[0050] After the gripper is closed and the object is grasped, based on the shortest distance between the initial coordinates of the target object and the final coordinates of the target object, the three-dimensional coordinate movement increment and coordinate chan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More