

Instrument visual tracking method for laparoscopic minimally invasive surgery
A technique for surgical instruments and minimally invasive surgery, applied in the field of laparoscopic minimally invasive surgery, can solve the problems of excessive perception error, insufficient positioning accuracy, and low detection efficiency of surgical instruments, so as to reduce error and output delay, and improve segmentation accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
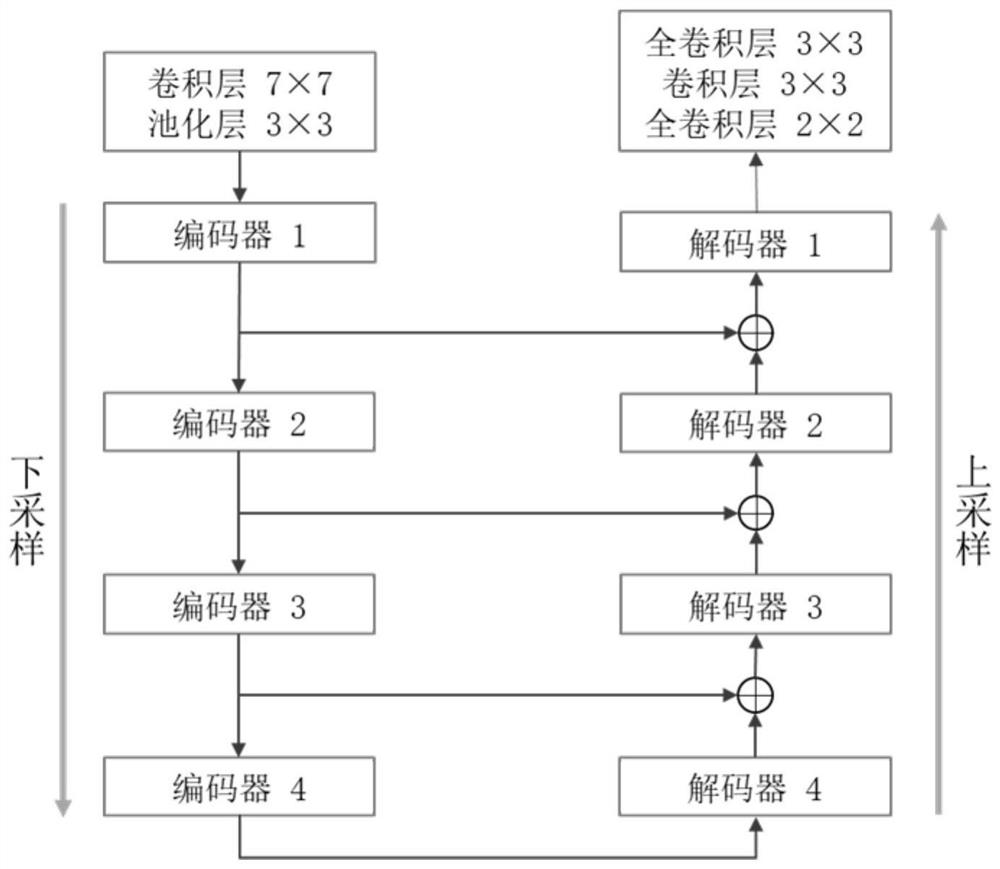
[0051] The present invention is based on deep learning method. Under the preoperative label of the surgical instrument, the present invention is first detected or divided from the surgical video stream, and the local characteristics are extracted, and the detection and positioning efficiency and characteristics of the surgical instrument are greatly improved. Accuracy of the extraction; simultaneously utilizing image filtering algorithms and regional screening to improve the identification accuracy of the tracking target point; then express 2D-3D between the surgical instrument and the target area by modeling and mathematical expression Conversion relationship to determine depth perception of the operator and target area; finally realize the real-time tracking program of the target point using the mask algorithm. Establishing data sets through clinical medicine guidance to train and test surgery instrument detection models, realizing automated detection and tracking of laparoscopi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More