

Robot puncture positioning method and device for biliary tract puncture
A positioning method and technology of positioning device, which are applied to puncture needles, computer-aided surgery, computer-aided planning/modeling, etc., can solve the problems of low puncture positioning accuracy, and achieve the effect of reducing the number of needle penetrations and improving the accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
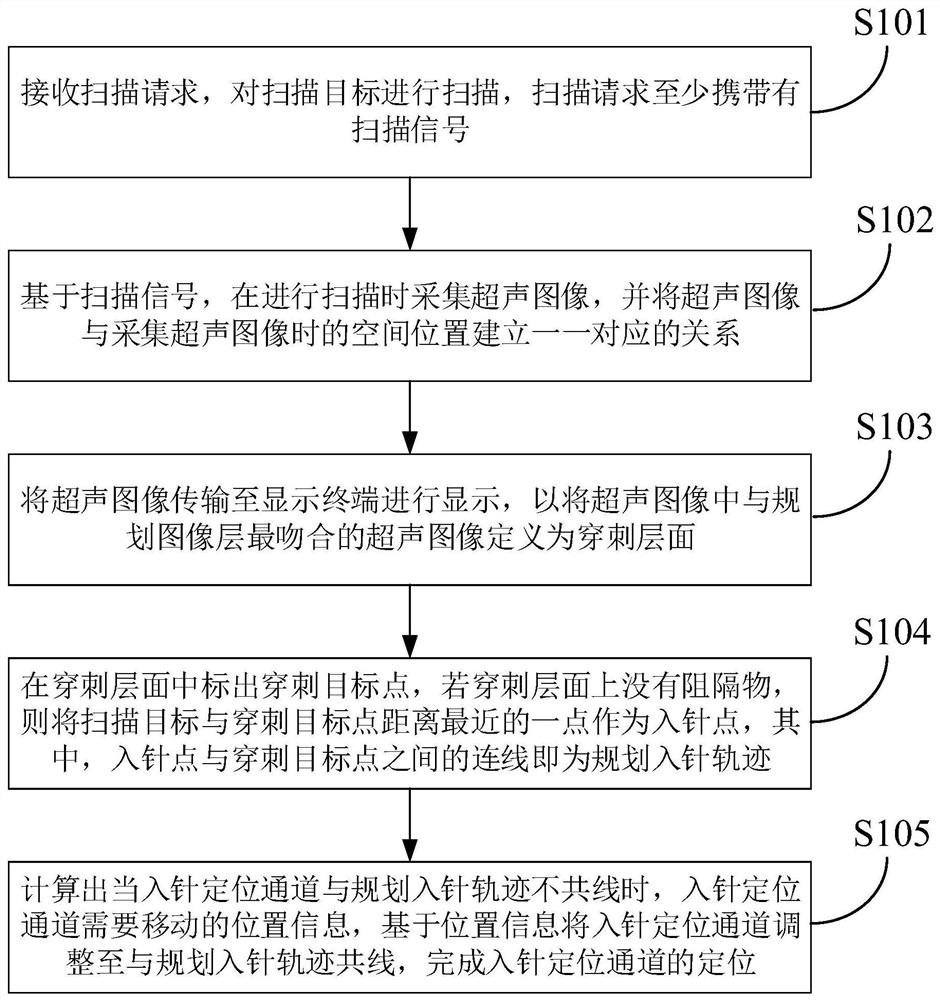
[0065] According to an embodiment of the present invention, a robot puncture positioning method for biliary tract puncture is provided, see figure 1 and figure 2 , including the following steps:
[0066] S101: Receive a scan request, and scan the scan target, where the scan request at least carries a scan signal;
[0067] S102: Based on the scan signal, acquire an ultrasound image during scanning, and establish a one-to-one correspondence between the ultrasound image and the spatial position when the ultrasound image is acquired;
[0068] S103: Transmitting the ultrasound image to the display terminal for display, so as to define the ultrasound image in the ultrasound image that is most consistent with the planned image layer as the puncture level;
[0069] S104: Mark the puncture target point on the puncture layer. If there is no barrier on the puncture layer, use the closest point between the scanning target and the puncture target point as the needle entry point, wherein...
Embodiment 2
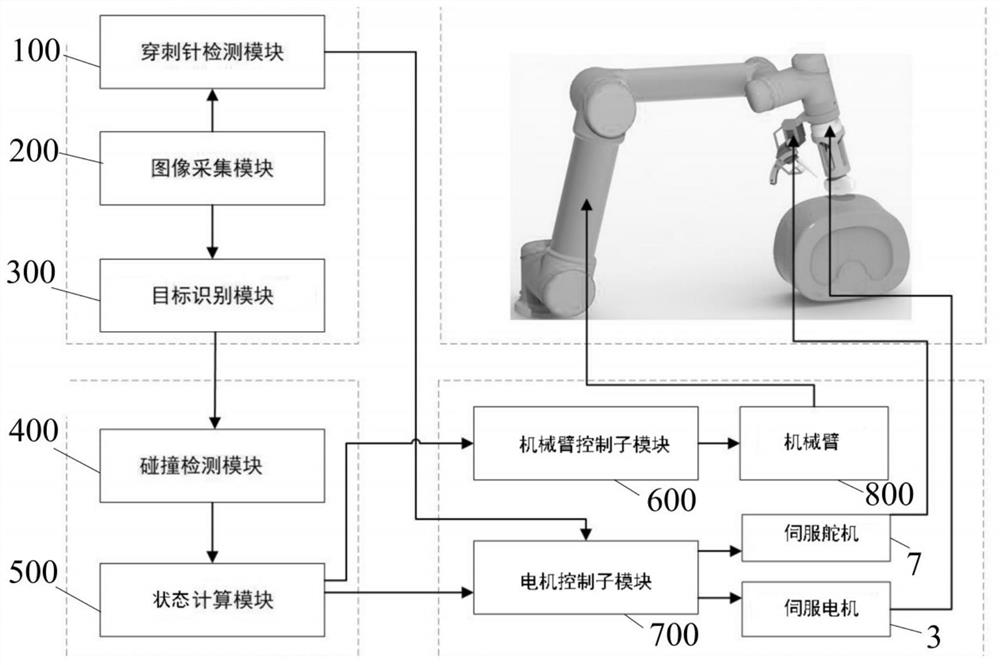
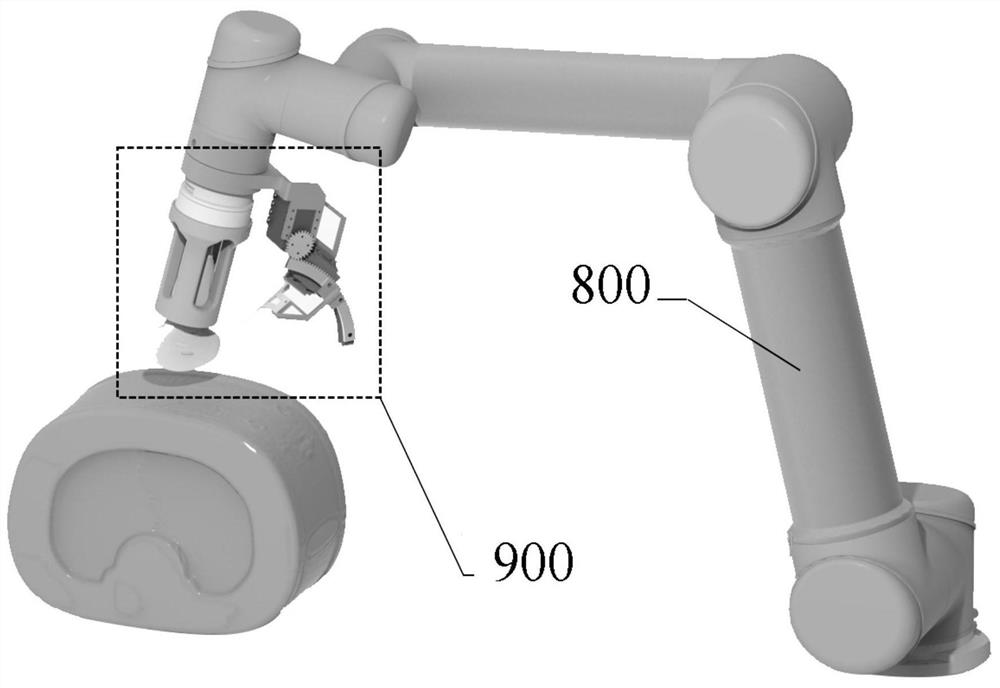
[0119] According to another embodiment of the present invention, a robot puncture positioning device for biliary puncture is provided, see Figure 2 to Figure 5 , including: a manipulator, an image acquisition module 200, a target recognition module 300, a collision detection module 400, a state calculation module 500 and a motion control module;
[0120] The motion control module is used to control the movement of the manipulator with six degrees of freedom, and controls the manipulator to scan the scanning target based on receiving the scanning request, and the scanning request carries at least a scanning signal;
[0121] The image acquisition module 200 is configured to acquire an ultrasonic image during scanning based on the scanning signal, and establish a one-to-one correspondence between the ultrasonic image and the spatial position when the ultrasonic image is acquired;
[0122] The target recognition module 300 is configured to transmit the ultrasound image to the dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More