Autonomous laying, recycling and charging device for AUV (Autonomous Underwater Vehicle) under severe sea conditions
A charging device and sea state technology, applied in circuit devices, electric vehicle charging technology, ship accessories, etc., can solve the problems of difficult and high-precision docking, easy damage, etc., and achieve the effect of reducing requirements and reducing the risk of collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
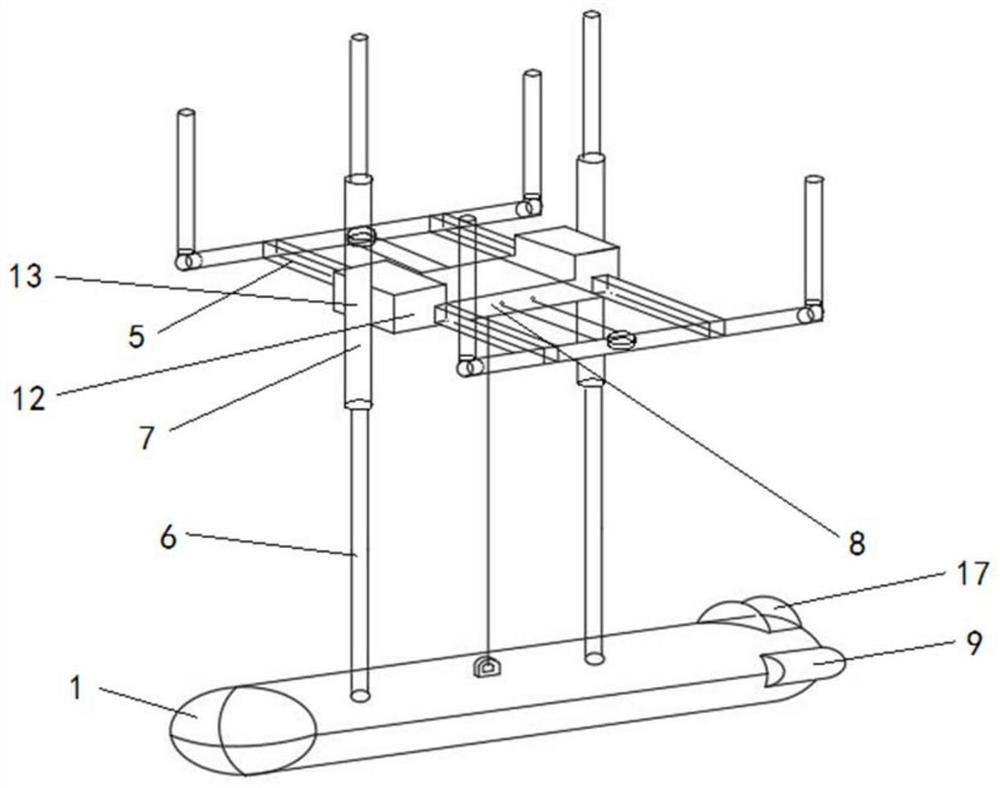
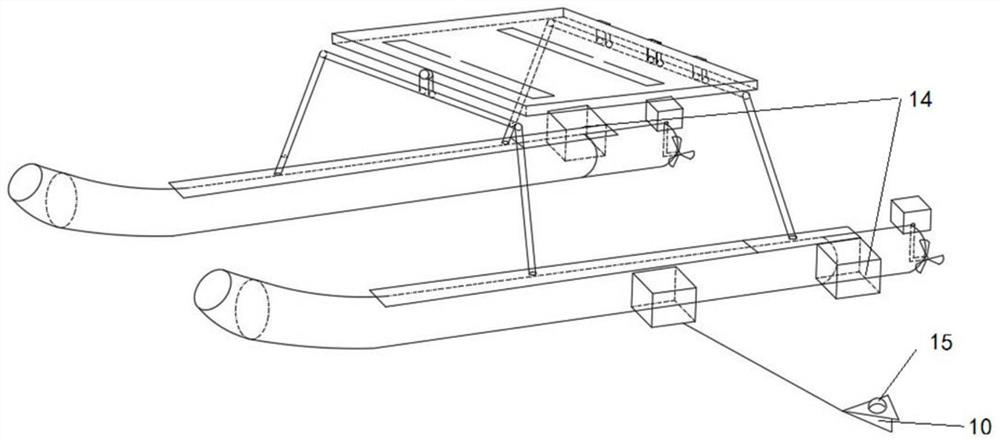
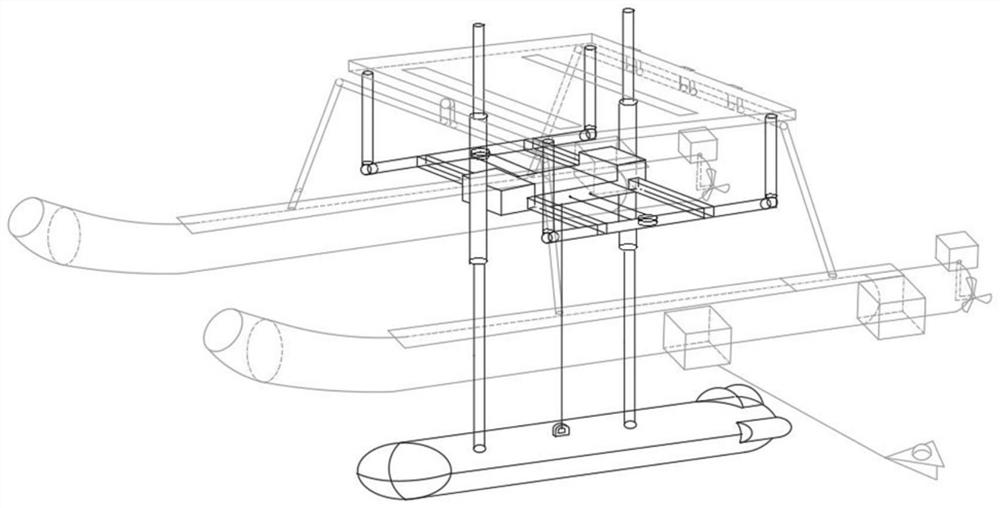
[0044] Such as figure 1 , figure 2 and image 3As shown, the present invention provides a device for autonomously and quickly deploying and recovering AUVs under harsh sea conditions. A more ideal effect can be obtained on the modular unmanned boat WAM-V. The recovered AUV is not allowed to have a dorsal fin, but a tail fin is allowed.
[0045] The device includes an elliptical cylinder capture cage 1, an AUV locking component 2, a wireless charging component 3, a wireless charging position identifier 4, a horizontal horizontal guide rail 5, a vertical rod 6, a stabilizing sleeve 7, a depth controller 8, and a main light group 9 , Underwater gliding wing 10, buffer pad 11, lateral movement controller 12, vertical rod locking clip 13, auxiliary light group 14, deployed side-view monitoring mechanism 15, AUV drive-in detector 16, fixed main camera 17, Lock the buckle 18 , the screw 19 and the wireless charging ring 20 .
[0046] The vertical rod 6 is made of high-strength a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More