

Multifunctional diagnosis and treatment manipulator for midwifery
A manipulator and multi-functional technology, applied in the field of manipulators, can solve the problems of pulling angle, difficult adjustment of speed, large fetal head injury, and small midwifery effect, so as to improve the production success rate, reduce deformation and stabilize the angle Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
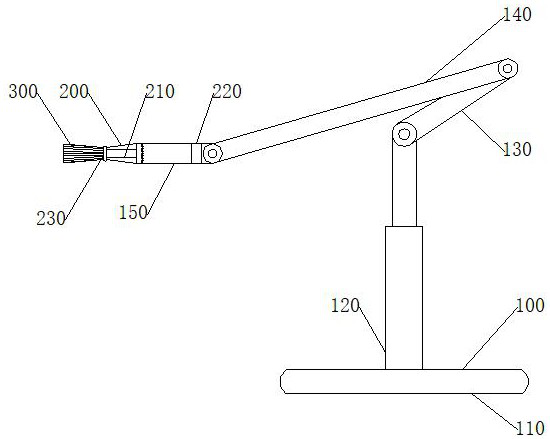
[0054] like Figure 1-6 As shown in a midwife treatment multifunction manipulator, comprising a robot arm assembly 100,
[0055] And further comprising a suction assembly 200 is assembly 300;
[0056] The robot arm assembly 100 for the pulling operation of the fetus; significantly better than the stability of the robot arm to be manually operated, the auxiliary artificial as to adjust the position of the robot arm, the angle;
[0057] The robot arm assembly 100 includes a plurality of rotating arms, robot arm assembly to adjust the angle of pulling the fetus;
[0058] The robot arm assembly 100 includes a positioning arm 150, the arm 150 is a rotating arm positioning assembly 100 moves the robot arm end a rotating arm;
[0059] The positioning arm 200 is fixed to the operating assembly 150;
[0060] Said operating assembly 200 comprises a telescopic rod 210, the pump assembly 220, positioning ring 230;
[0061] The telescopic rod 210 for pulling the fetus; the telescopic rod 210 is a...
Embodiment 2
[0080] like Figure 1-6 , The specific structure of the robotic arm assemblies, by trial, three rotary arm is provided, comprising a first rotary arm 130, a second rotary arm 140, a positioning arm 150; three rotary arm can be easily adjusted to various angles, small angle and large angle to facilitate trimming .
[0081] The robot arm assembly 100 further includes a base 110 and a telescoping rod 120 of the base;
[0082] The base end of the telescopic rod 120 fixed to the base 110, the other end of the hinge 130, the hinge arm at a first rotation angle by the rotation of the stepping motor for adjusting the first rotary arm 130;
[0083] The rotary arm 140 and the second end 130 of the spare articulated arm hinged at a first rotation angle of the stepping motor by the rotation of the second rotary arm 140 is adjusted;
[0084] The positioning arm 150 and the second end hingedly vacant rotary arm 140, hinged at the rotation angle of the positioning arm 150 by a stepping motor. Spe...
Embodiment 3
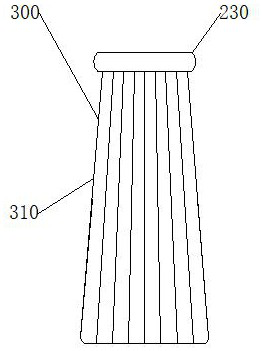
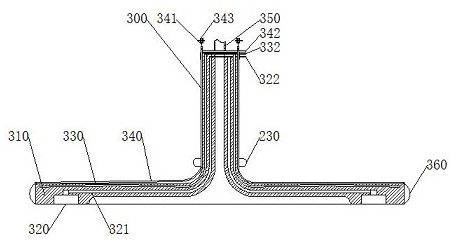
[0086] like Figure 3-5 , The outer surface of the disk-shaped plate 310 fixed to the plurality of tube 340 is pulled, the pulling pipe outer circumferential edge 340 of the disk-shaped end plate 310 is fixedly connected to the pull tube 340 and the disk-shaped plate portion 310 is fixedly connected to the outer surface, fixed portion in a straight line and a straight line through the center of the disc-shaped sheet 310 laid flat condition, the length of the fixed portion of the disc-shaped circle accounted sheet 310 laid flat condition radius 1 / 2-3 / 4;
[0087] The other end of the pulling pipe 340 with the wire 341, the wire 341 is fixed to the vacant terminal on the adjustment knob 343, adjustment knob 343 can rotate and thus pulling the wire 341 pulling the edge of the disk-shaped plate 310. Adjustment knob 343 is rotatably positioned on the positioning arm 150.
[0088] The pulling action of the tube 340 is mainly sucker position of a trimming unit 320, a disk-shaped plate ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More