Finite time self-adaptive stabilization control method and system for mechanical arm system
A time-limited, stabilizing control technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as poor robustness, equipment wear, and poor control accuracy, to ensure robust adaptive stabilization, solve control problems, Guaranteed effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
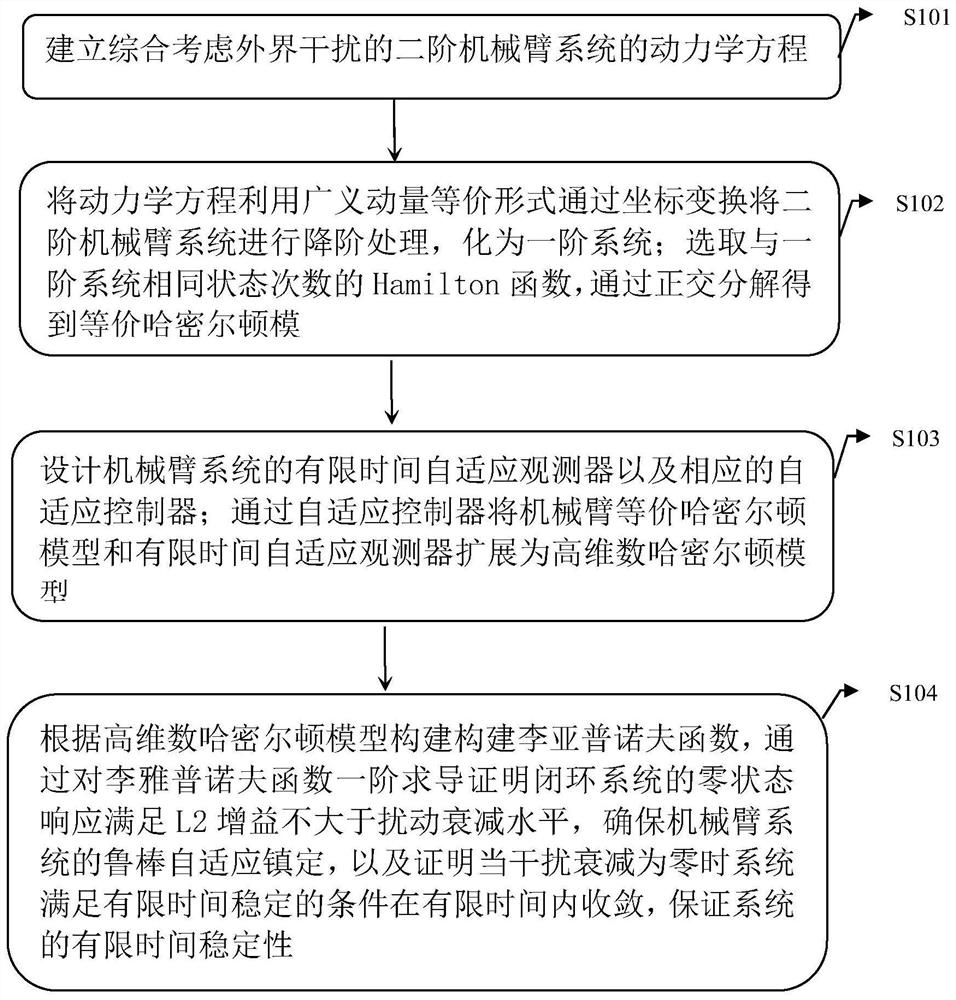
[0132] Embodiment 1 of the present invention proposes a finite-time self-adaptive stabilization control method for a manipulator system, using a finite-time observer, which is different from the stability result of an infinite-time observer. Under a finite-time observer, the closed-loop system can quickly converge, and the external The interference has good robustness, and the invention adopts the Lyapunov function to ensure the robust self-adaptive stabilization of the manipulator system, solves the control problem of the parameter uncertainty system model, and improves the self-adaptability of the manipulator system. like figure 1 A flow chart of a limited-time self-adaptive stabilization control method for a manipulator system in Embodiment 2 of the present invention is given.
Embodiment 2
[0132] Embodiment 1 of the present invention proposes a finite-time self-adaptive stabilization control method for a manipulator system, using a finite-time observer, which is different from the stability result of an infinite-time observer. Under a finite-time observer, the closed-loop system can quickly converge, and the external The interference has good robustness, and the invention adopts the Lyapunov function to ensure the robust self-adaptive stabilization of the manipulator system, solves the control problem of the parameter uncertainty system model, and improves the self-adaptability of the manipulator system. like figure 1 A flow chart of a limited-time self-adaptive stabilization control method for a manipulator system in Embodiment 2 of the present invention is given.
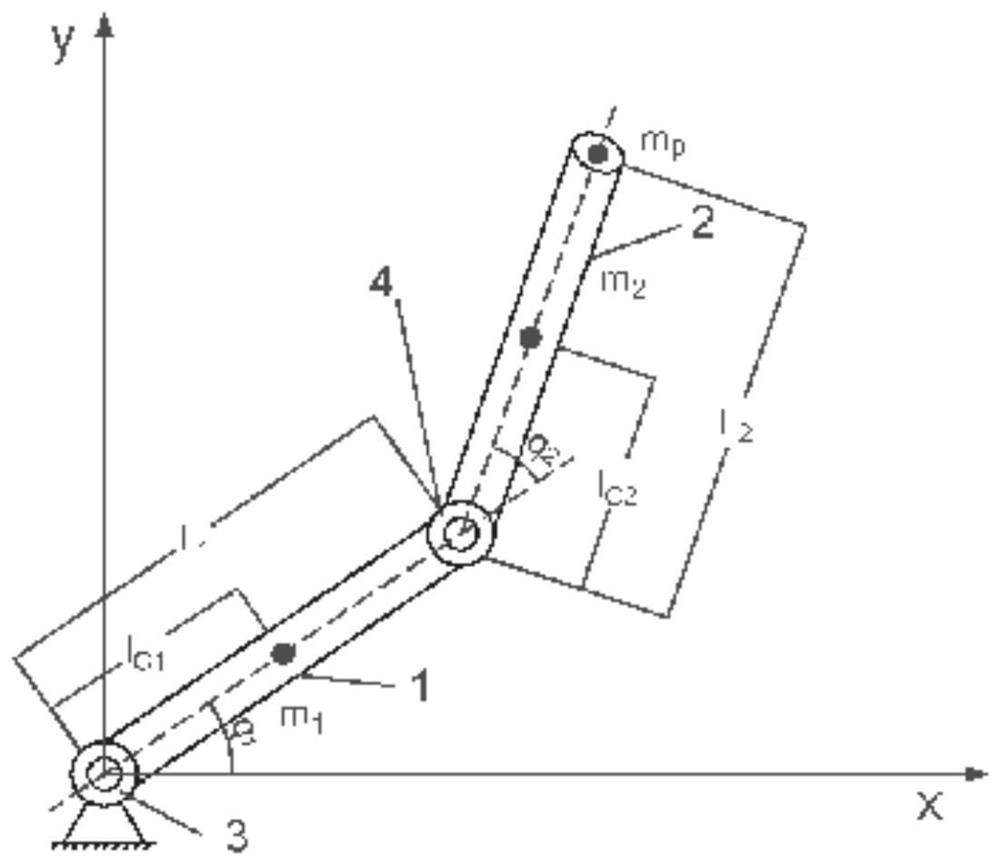
[0133] In step S101, a dynamic equation of the second-order manipulator system comprehensively considering external disturbances is established. like figure 2 It is a schematic diagram of the pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More