Data acquisition, visualization and calibration method and system of roadside sensing system
A perception system and data acquisition technology, which is applied in the traffic control system, transmission system, and image data processing of road vehicles, can solve the problems of cumbersome calibration schemes, calibration of a single sensor, and high time cost, and achieve long-distance transmission and upgrade Effect of Calibration Efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
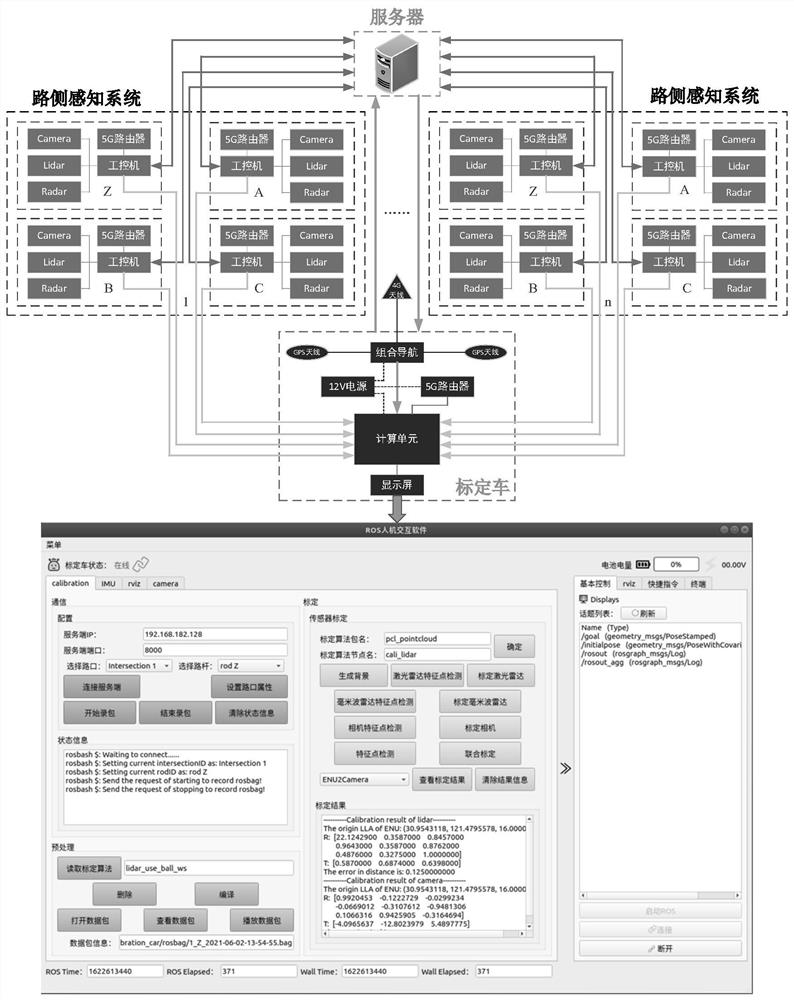
[0060] A method for data collection, visualization and calibration of a roadside perception system provided according to the present invention, comprising:
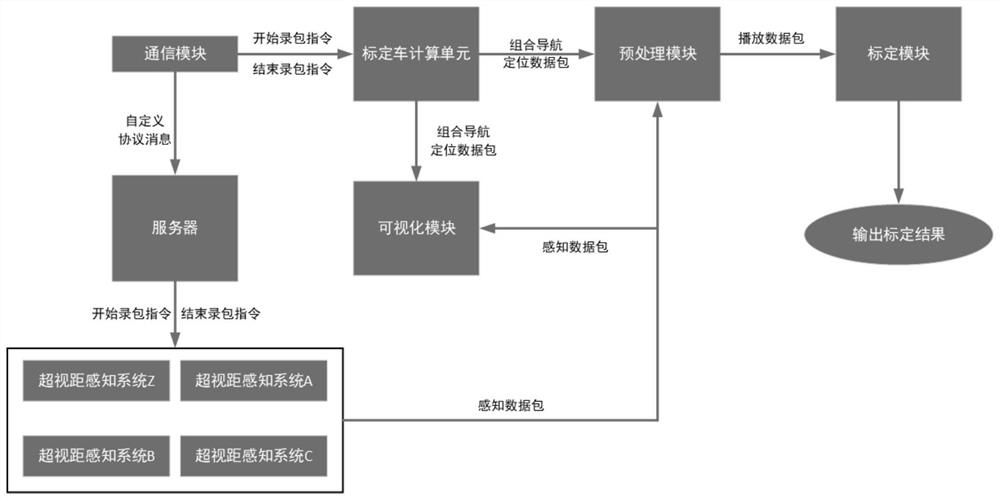
[0061] Step S1: When the calibration vehicle terminal executes the start packet recording operation, the calibration vehicle terminal uses UDP communication to send the start packet recording command to the server, and the server forwards the start packet recording command to the roadside over-the-horizon perception sensor to be calibrated in the custom message protocol system, the over-the-horizon sensing system starts recording packets, and records the sensing result data of each sensor. When the over-the-horizon sensing system starts recording packets, the calibration vehicle immediately starts recording packets, and records the positioning of the integrated navigation on the calibration vehicle. data;
[0062] Step S2: When the calibration vehicle end performs the operation of ending packet recording, the calibration ...
Embodiment 2
[0103] Embodiment 2 is a preferred example of embodiment 1
[0104] The invention realizes raw data acquisition and visualization of the calibration vehicle end and the roadside perception system end through a visualized interface operation, and realizes automatic calibration of laser radar, millimeter wave radar and camera in the perception system, and outputs calibration results; uses UDP communication to realize calibration vehicle end, server end and roadside sensing end to control the transmission of instructions, so as to realize the automatic collection and storage of the positioning data of the calibration vehicle end and the sensing data of each sensor on the roadside sensing end, and realize the long-distance transmission of roadside end data; realize integrated navigation Visualization of positioning data and roadside perception system perception data; through the visual operation interface, the absolute calibration and relative calibration of lidar, millimeter wave ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com