

Radar calibration method and device, electronic equipment and storage medium
A calibration method and radar technology, applied in the field of radar, can solve the problems of low accuracy of calibration results, manual calibration, and inability to guarantee real-time synchronization of the road environment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
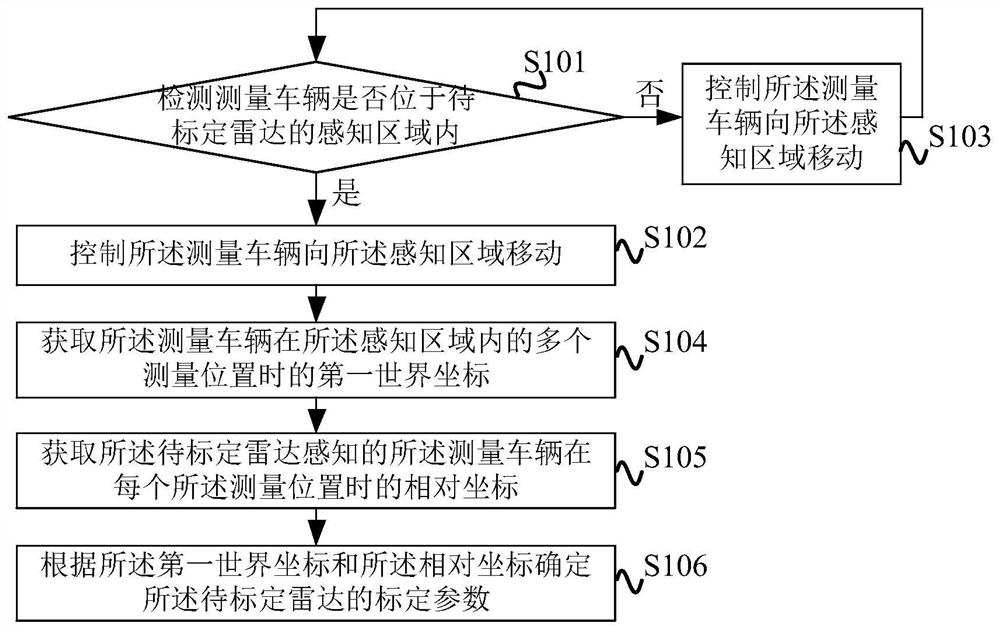
[0034] figure 1 It is a flowchart of a radar calibration method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of calibrating roadside radars. The method can be executed by a radar calibration device, which can be implemented by software and / or hardware implementation, which can be configured in an electronic device, for example, can be configured in a server. The method specifically includes the following steps:
[0035] S101. Detect whether the measuring vehicle is located in the sensing area of the radar to be calibrated.
[0036] In the embodiment of the present invention, the measurement vehicle may be an unmanned road test vehicle, and various sensors may be installed on the measurement vehicle, for example, sensors such as radar, camera, and positioning module may be installed. The radar to be calibrated can be the roadside lidar that needs to be calibrated. The need for calibration can mean that the roadside lidar ...
Embodiment 2
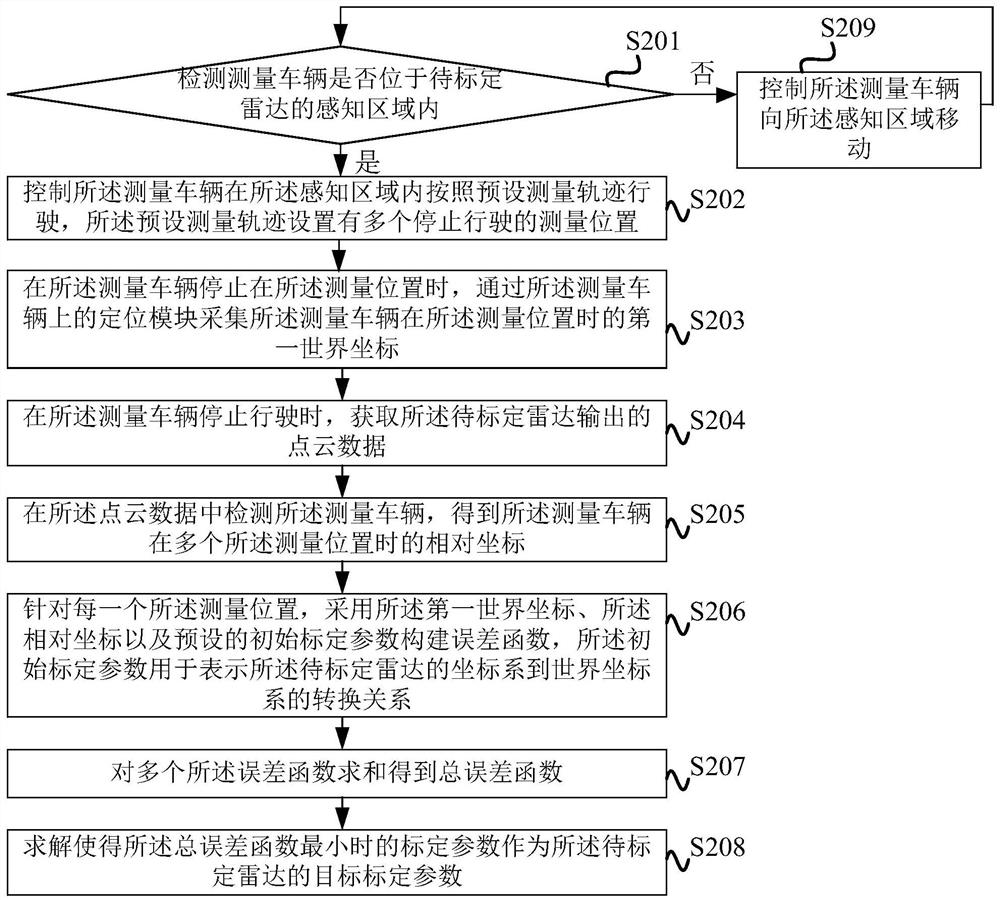
[0050] figure 2 It is a flowchart of a radar calibration method provided by Embodiment 2 of the present invention. This embodiment is optimized on the basis of the foregoing Embodiment 1. The method specifically includes the following steps:
[0051] S201. Detect whether the measuring vehicle is located in the sensing area of the radar to be calibrated.
[0052] Specifically, the measurement vehicle can be an unmanned road test vehicle, the radar to be calibrated can output point cloud data according to a preset frequency, and when the measurement vehicle is identified from the point cloud data, it is determined that the measurement vehicle is located in the sensing area of the radar to be calibrated In one example, a detection model for identifying and measuring vehicles can be trained in advance, and the point cloud data output by the radar to be calibrated is input into the detection model to obtain the detection result. If the detection result is that the measuring ve...
Embodiment 3
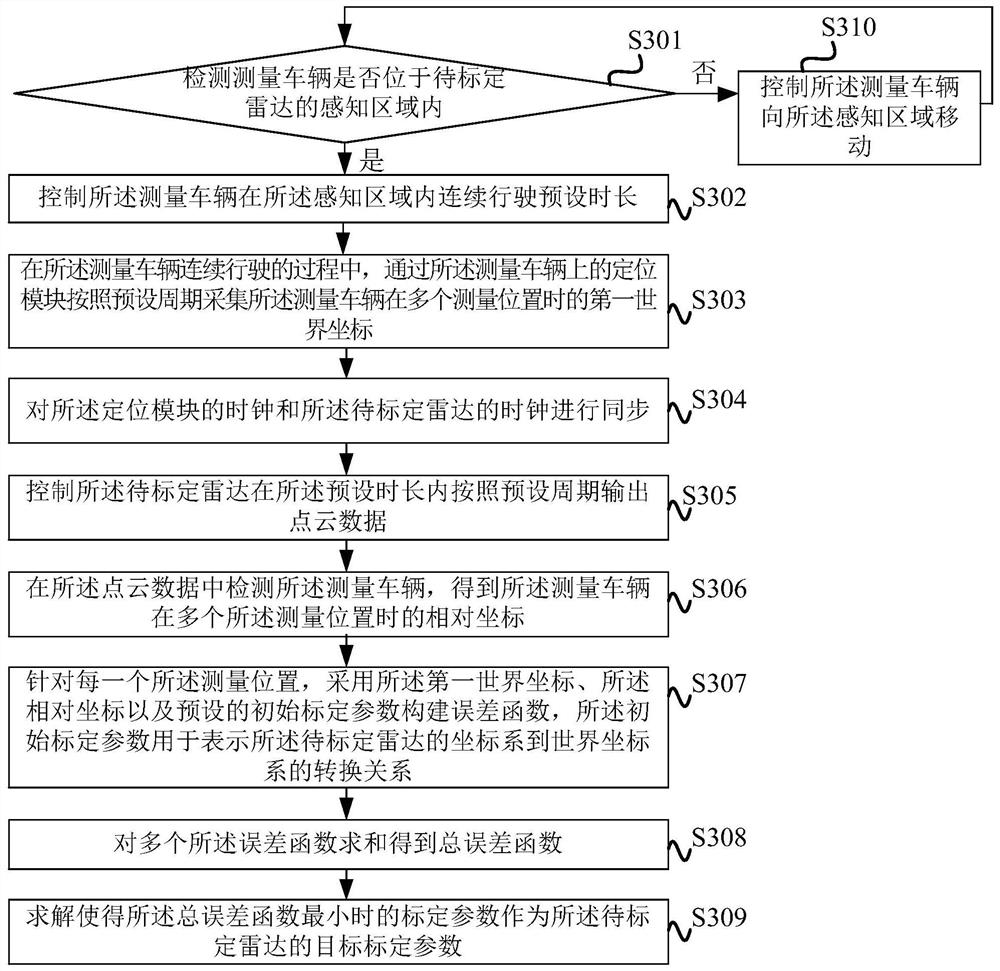
[0081] image 3 It is a flowchart of a radar calibration method provided by Embodiment 3 of the present invention. This embodiment is optimized on the basis of the foregoing embodiments. The method specifically includes the following steps:
[0082] S301. Detect whether the measuring vehicle is located in the sensing area of the radar to be calibrated.
[0083] Specifically, the measurement vehicle can be an unmanned road test vehicle, the radar to be calibrated can output point cloud data according to a preset frequency, and when the measurement vehicle is identified from the point cloud data, it is determined that the measurement vehicle is located in the sensing area of the radar to be calibrated In one example, a detection model for identifying and measuring vehicles can be trained in advance, and the point cloud data output by the radar to be calibrated is input into the detection model to obtain the detection result. If the detection result is that the measuring vehi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More