Three-degree-of-freedom bionic eye driven by air bag
A technology of bionic eyes and degrees of freedom, applied in the field of bionic robots, to achieve the effects of convenient control, compact structure, and good movement flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
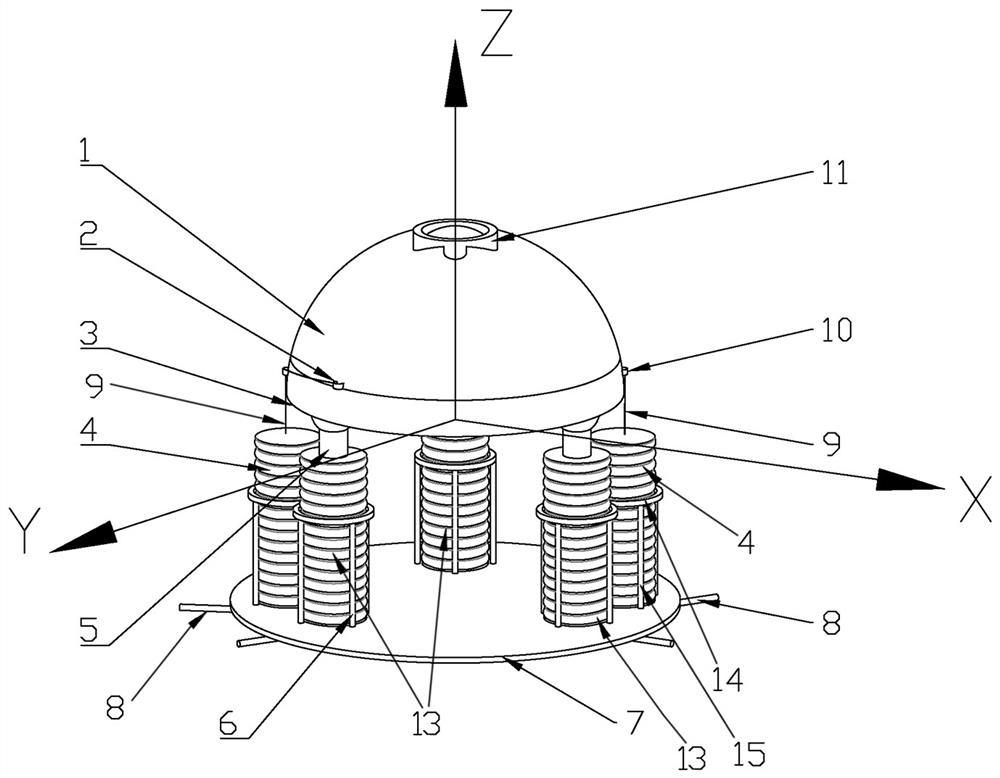
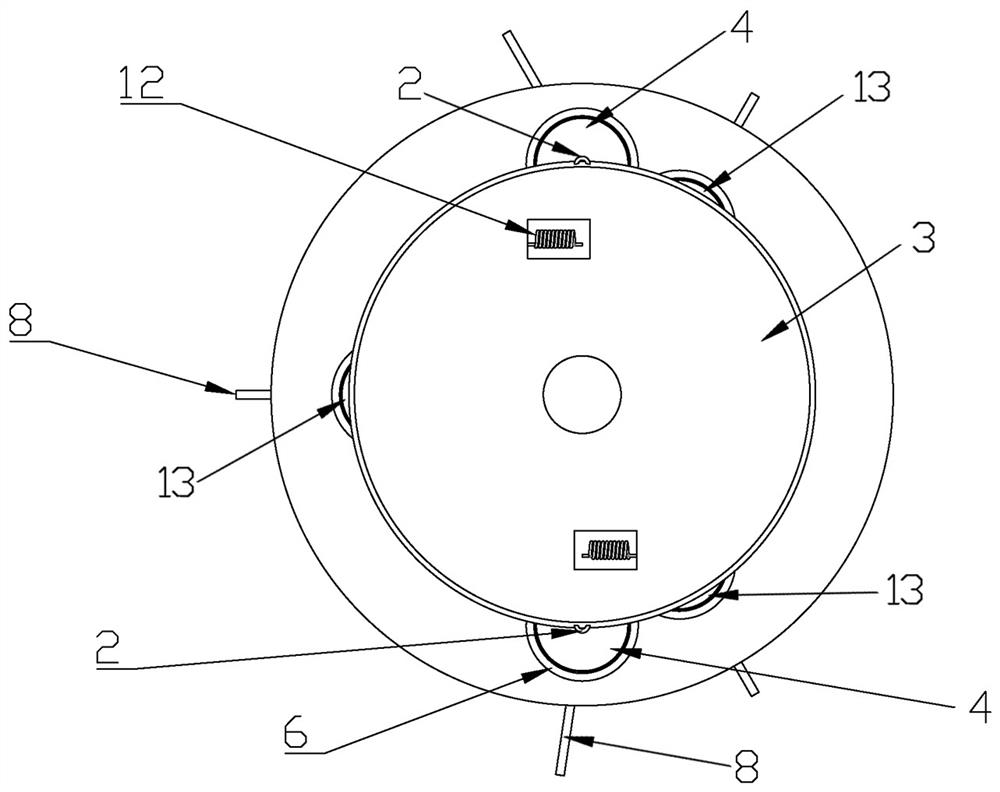
[0038] A three-degree-of-freedom bionic eye driven by an airbag, its structure is as follows Figure 1-Figure 2 As shown, it includes a hemispherical bionic eye, and a three-degree-of-freedom driving mechanism is provided on the hemispherical bionic eye. The three-degree-of-freedom driving mechanism includes a platform fixed base plate 7, and a linear drive structure and a flexible drive structure that cooperate with each other are provided on the platform fixed base plate 7. Both the linear driving structure and the flexible driving structure are connected with the hemispherical bionic eye. The hemispherical bionic eye includes a hemispherical bionic shell 1, an image collector 11 is provided at the end of the spherical side of the hemispherical bionic shell 1, and a bionic bottom shell 3 is provided on the plane side of the hemispherical bionic shell 1, and the bionic bottom shell 3 The side close to the hemispherical bionic shell 1 is provided with a shell chute; the inner ...
Embodiment 2
[0054] A three-degree-of-freedom bionic eye driven by an airbag is different from Embodiment 1 in that: the airbag support ring 14 is fixedly connected to the telescopic airbag; the support ring connecting rod 15 is a telescopic connecting rod; The stretching and movement of the airbag drives the support ring connecting rod 15 to expand or contract, so as to facilitate the continuous fixing action of the linear telescopic airbag 13 and the flexible telescopic airbag 4 .
Embodiment 3
[0056] An airbag-driven three-degree-of-freedom bionic eye is different from Embodiment 1 in that: the side of the platform fixing bottom plate 7 away from the airbag support frame 6 is provided with a trachea groove that is loosely matched with the trachea 8 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More