

Friction-driven material pushing robot
A pusher robot, friction-driven technology, applied in the direction of conveyor objects, animal feeding devices, loading/unloading, etc., can solve the problems of insufficient pusher capacity, large front resistance, and inadequate push, etc., to improve cleaning and push Effects, Improving Push Ability, Reducing Missed Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
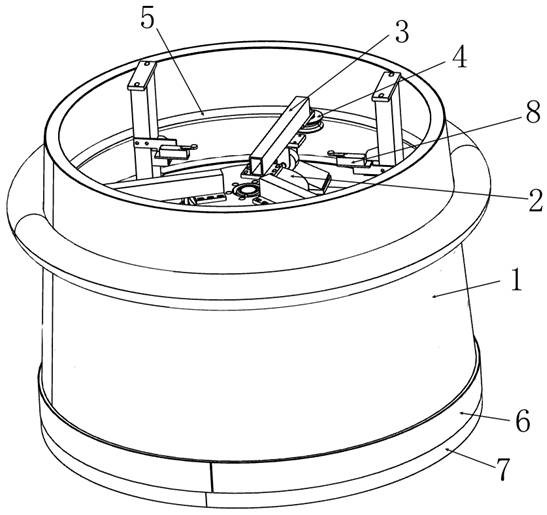
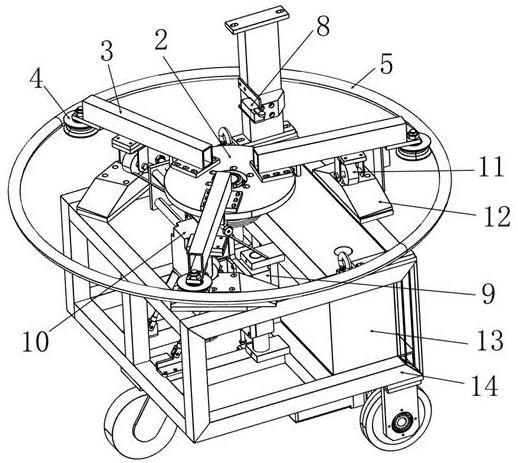
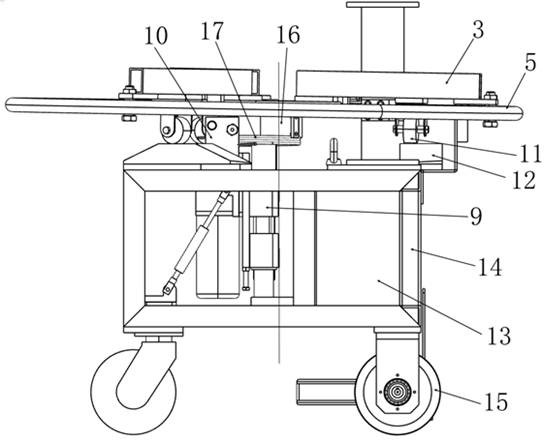
[0032] In a typical embodiment of the present invention, such as Figure 1-Figure 4 As shown, a friction-driven pushing robot is proposed.
[0033] Aiming at the problem that the current pusher robot is difficult to effectively push and stack loose and light feed, a friction-driven pusher robot is provided. The friction-driven rotating shell 1 is set to push and accumulate the feed. Surface to obtain friction to drive the rotating shell 1 to rotate, reduce the impact of feed contact cylinder friction on pushing efficiency, solve the problem of poor pushing efficiency of traditional pushing robots, and improve the ability to push scattered feed.
[0034] For the friction-driven pusher robot, it mainly includes a self-propelled platform, a rotating shell 1, a guide plate 2 and a lifting mechanism. The self-propelled platform is used as a whole mobile load-bearing structure, which drives the components installed on it to move as a whole, along the extension direction of the fence...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More