Vehicle positioning method and device based on radar point cloud and storage medium
A vehicle positioning and point cloud technology, applied in the field of devices and storage media, and in the field of vehicle positioning methods based on radar point clouds, can solve the problems of poor laser positioning accuracy and robustness, redundant reference information and positioning, and different positioning results. Achieve the effect of improving laser positioning accuracy, improving vehicle positioning accuracy, and improving registration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
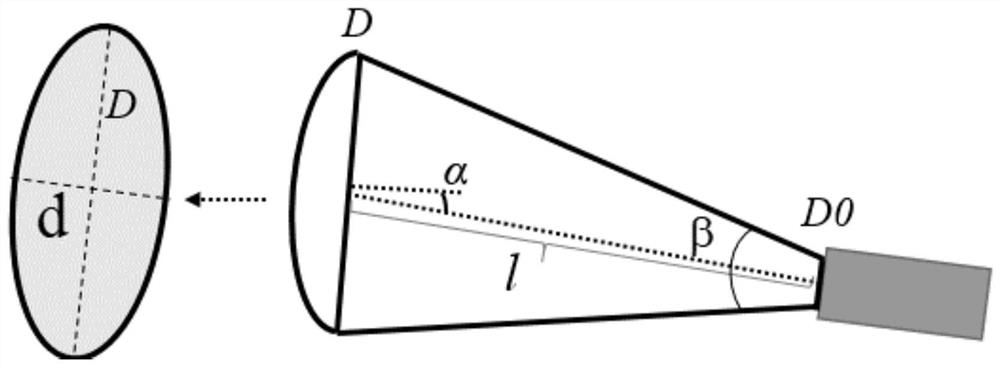
[0050] This embodiment provides a vehicle positioning method based on radar point cloud. Due to the point cloud projection spot problem, the oblique projection of the beam causes the diameter of the spot to become larger; at the same time, there are sparsity and multi-scale characteristics among the multi-line beams of the lidar, resulting in point There are spatial distribution errors in the features extracted from the cloud, which lead to point cloud registration and positioning errors.
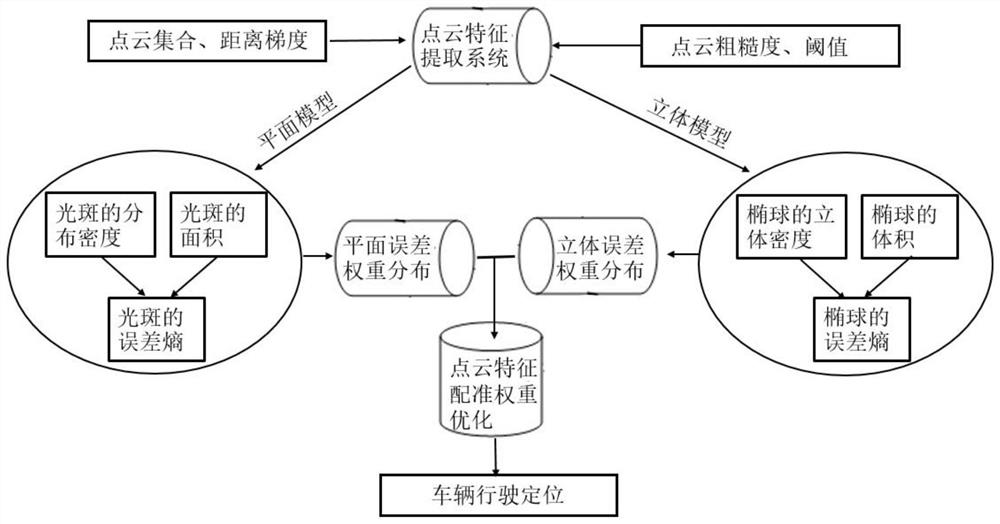
[0051] Therefore, the method provided in this embodiment is based on a radar point cloud-based vehicle positioning system. Such as figure 1 As shown, the system includes a point cloud feature extraction system, a feature evaluation system, and a feature optimization registration and positioning system, and the three are in a step-by-step relationship. Point cloud feature extraction system, including point cloud roughness and point cloud line and surface feature extraction operations; featu...
Embodiment 2
[0118] This embodiment provides a vehicle positioning device based on radar point cloud, including a memory and a processor, the memory is used to store a computer program, and the processor is used to realize the embodiment 1 when executing the computer program. The vehicle positioning method based on the radar point cloud has been specifically described in Embodiment 1, and will not be repeated in this embodiment.
Embodiment 3
[0120] This embodiment provides a storage medium on which a computer program is stored. When the computer program is executed by a processor, the vehicle positioning method based on radar point cloud is realized. This method has been specifically described in Embodiment 1. This embodiment Examples will not be repeated.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More