A robot closed-loop detection method based on 3D point cloud
A closed-loop detection, three-dimensional point cloud technology, applied in instruments, image analysis, image enhancement and other directions, can solve the problems of different coordinate values of three-dimensional observation point cloud, difficult laser closed-loop detection, closed-loop detection difficulty, etc., to improve operation efficiency and improve Accuracy, the effect of reducing the number of point clouds
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
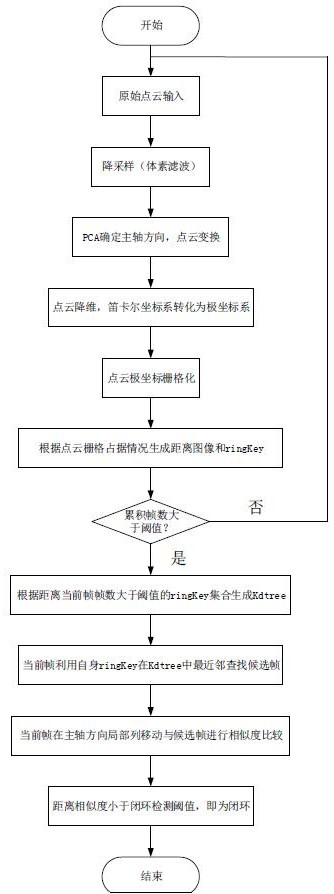
[0053] Such as figure 1 Shown is a flow chart of a robot closed-loop detection method based on a three-dimensional point cloud disclosed by the present invention, including the following steps:
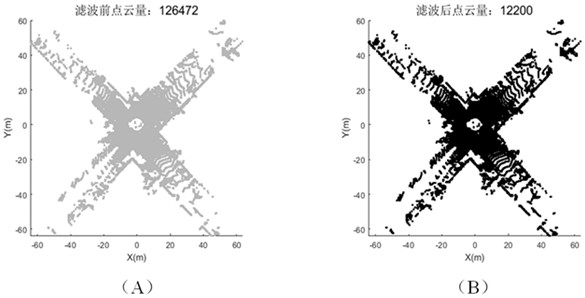
[0054] (1) First obtain the original input point cloud, in order to speed up the processing speed of the point cloud and improve the operation efficiency of the algorithm, the original point cloud voxel filter is down-sampled. Voxel filtering determines a three-dimensional voxel grid according to the range of the input original point cloud, and selects a point cloud for each voxel in the three-dimensional voxel grid as a representative of all point clouds in the voxel. When the size of each voxel in the voxel grid is small, the effect of reducing the number of point clouds while maintaining the distribution characteristics of point clouds can be achieved. Such as figure 2 As shown, it is the point cloud observed by the 3D lidar at a certain moment of the surrounding environment, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com