

Bionic bending driver and rehabilitation gloves
A drive and bending technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of only one-way movement, complex process, short life of the drive and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
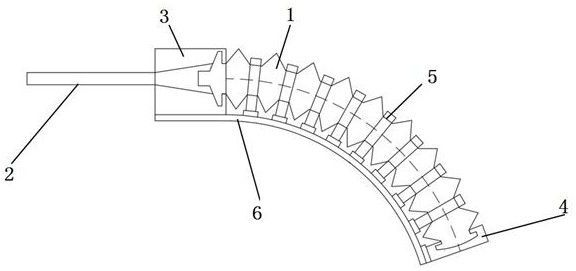
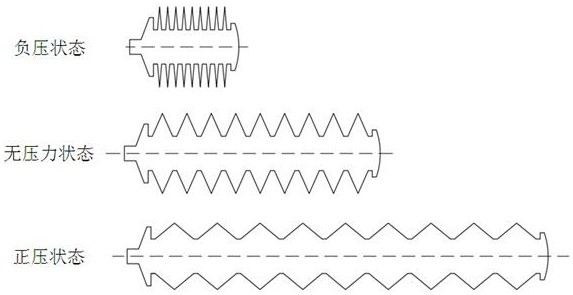
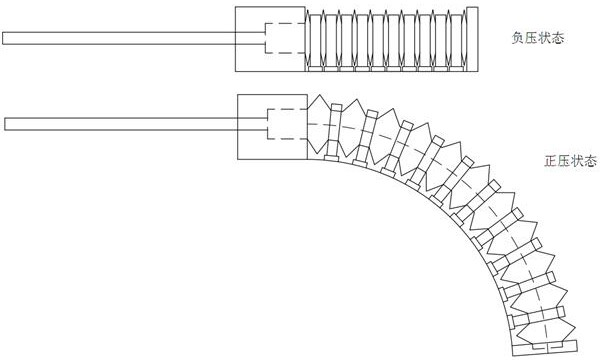
[0040] as attached Figure 7 As shown, the bionic bending driver in the present invention imitates the structure of the lobster tail, and a bionic exoskeleton is designed around the flexible airbag, and the stiffness of the bending driver can be programmable by adjusting the number and pitch of the bionic exoskeleton . Specifically, the bellows 1 imitates the muscle fibers of a lobster to perform telescopic movement, the fiber cloth 6 imitates the abdominal fibers of a lobster, the end fixing buckle 3, the front fixing buckle 4, and the middle fixing buckle 5 imitate the shell structure of a lobster, that is, the middle fixing buckle 5 corresponds to the exoskeleton, and the stiffness of the driver is adjusted by adjusting the distance and number of the exoskeleton, that is, the distance and number of the middle fixing buckles 5.
[0041] as attached image 3 to attach Figure 5 As shown, the relationship between the number N of the middle fixing buckles 5 and the number of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More