Vehicle-unmanned aerial vehicle multi-target cooperative path planning method
A path planning, drone technology, applied in vehicle position/route/altitude control, non-electric variable control, instruments, etc., can solve problems such as increasing complexity, and achieve the effect of high customer satisfaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Below in conjunction with accompanying drawing, the present invention will be further described, but the present invention is not limited in any way, and any transformation or replacement done based on the teaching of the present invention belongs to the protection scope of the present invention.
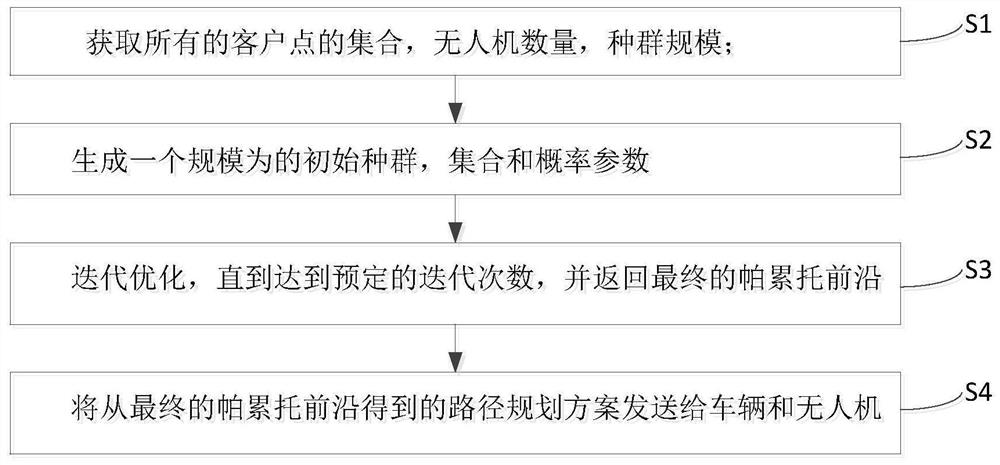
[0042] Such as figure 1 As shown, the vehicle-unmanned aerial vehicle multi-objective collaborative path planning method disclosed in the present invention comprises the following steps:
[0043] Obtain the set C of all customer points, the number of drones m, and the population size n;
[0044] Generate an initial population P of size n 1 , set PF and probability parameters;
[0045] Start iterative optimization: in each iteration, generate the offspring population Q based on the genetic operator t , and combine it with the parent population P t merge; use the perturbation strategy to merge the population R t Repeated solutions in ; perform non-dominated sorting in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com