

Teleoperation attitude tracking estimation system and method
A remote operation and attitude technology, applied in computing, image data processing, instruments, etc., to reduce the possibility of collision and improve work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0026] Example: Tracking and Estimation of 3D Pose of Teleoperated Manipulator Based on Multi-View Fusion Method
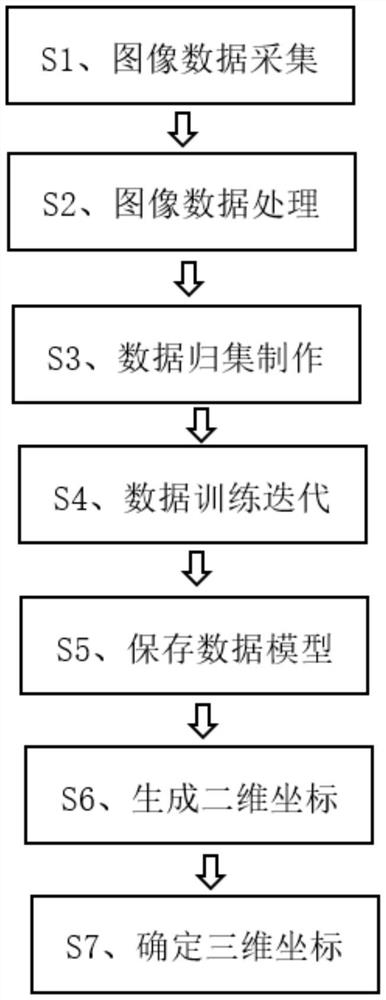
[0027] This embodiment is a method for tracking and estimating the three-dimensional posture of a teleoperated manipulator based on a multi-view fusion method applied in a complex environment. The tracking and evaluation method is mainly designed as follows:
[0028] Step 1: Collect image data, and use industrial cameras to acquire frame-synchronized pictures and attitude data from different angles of view; specifically, to acquire video frames of n angles of view; extract the single-frame video frame in the n angles of view based on the neural network model Initialize the pose estimation to obtain the two-dimensional coordinates of the single-view pose joint points corresponding to the n perspectives; because the production of the 3D pose estimation data set of the manipulator needs to collect the picture information of three industrial cameras and the 3D pose dat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More