

Error prediction and real-time compensation technology for five-degree-of-freedom hybrid robot
A technology of error prediction and real-time compensation, which is applied in the direction of manipulators, program-controlled manipulators, claw arms, etc., can solve problems such as difficult practical application, inability to obtain analytical inverse solutions, and difficulty in realizing real-time compensation, so as to achieve real-time compensation and solve measurement efficiency The effect of calibration accuracy with
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0081] This embodiment is aimed at a pose error prediction and compensation technology for a five-degree-of-freedom hybrid robot with a rotating bracket disclosed in Chinese patent publication No. CN104985596A.
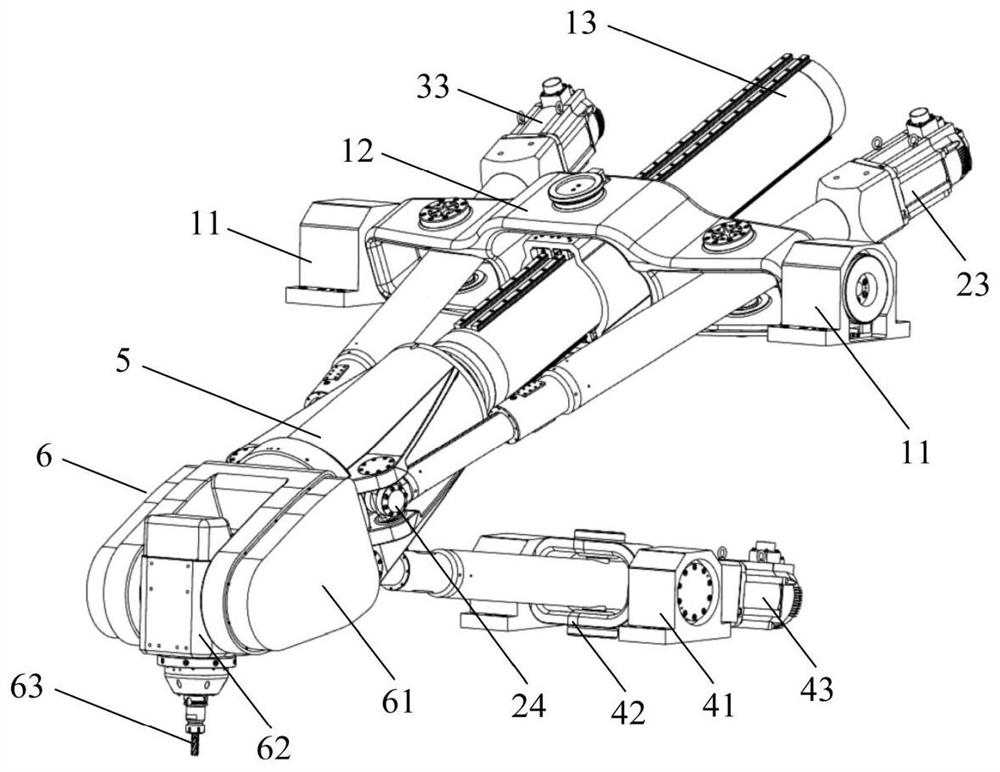
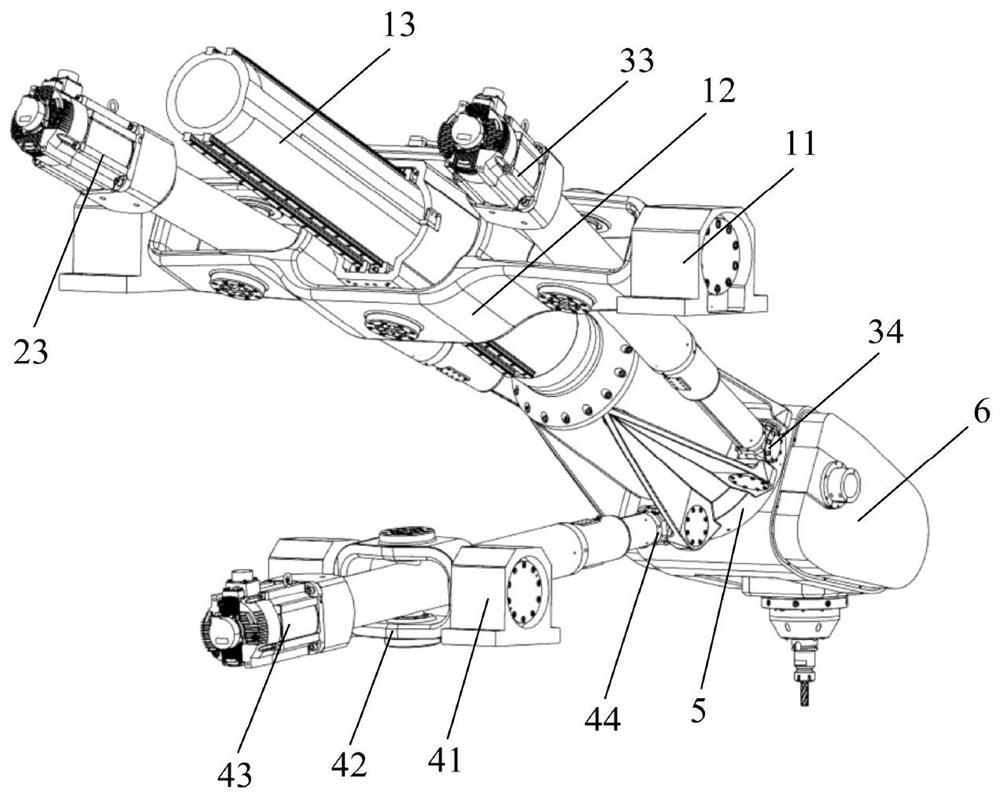
[0082] Attached below figure 2 And attached image 3 The structure of the five-degree-of-freedom hybrid robot disclosed in CN104985596A is briefly described. The robot is composed of a three-degree-of-freedom parallel mechanism with one translation and two rotations and a series-connected rotor with two rotational degrees of freedom connected in series, and the series-connected rotor 6 is fixedly connected to the moving platform of the parallel mechanism. The tandem rotary head 6 connected in series at the end of the moving platform 5 is a two-degree-of-freedom A / C swing head, including a first rotary shaft 61 and a second rotary ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More