

Traffic energy-saving safe moving trajectory planning control method
A technology for safe operation and trajectory planning. It is used in complex mathematical operations, special data processing applications, instruments, etc. It can solve the problems of discontinuous calculation of accompanying variables, increased calculation time, and complex EEDS, so as to avoid the risk of overspeed and reduce overall energy consumption. small effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
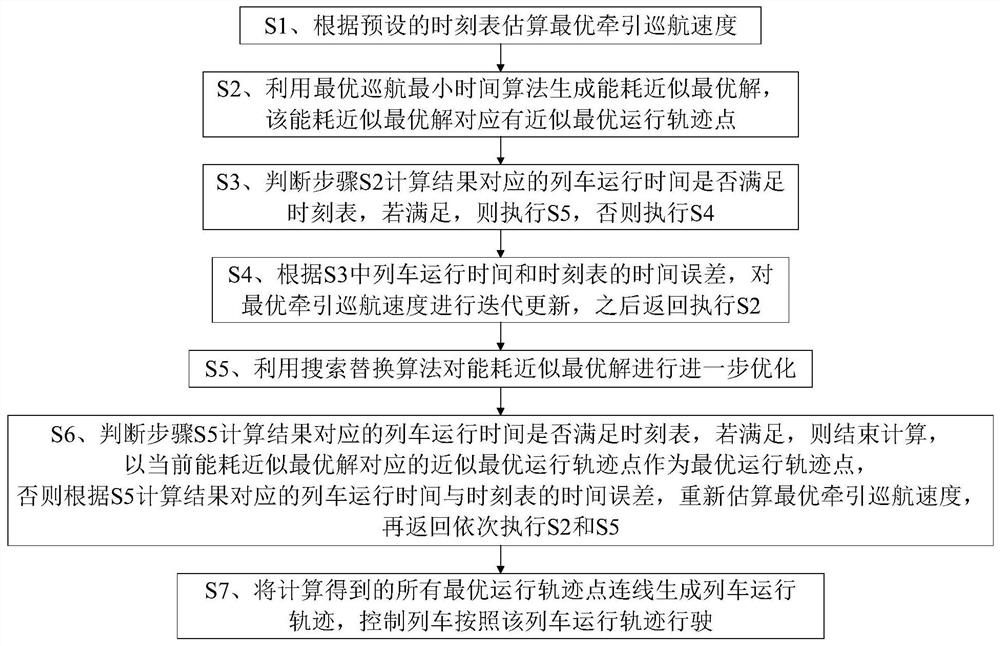
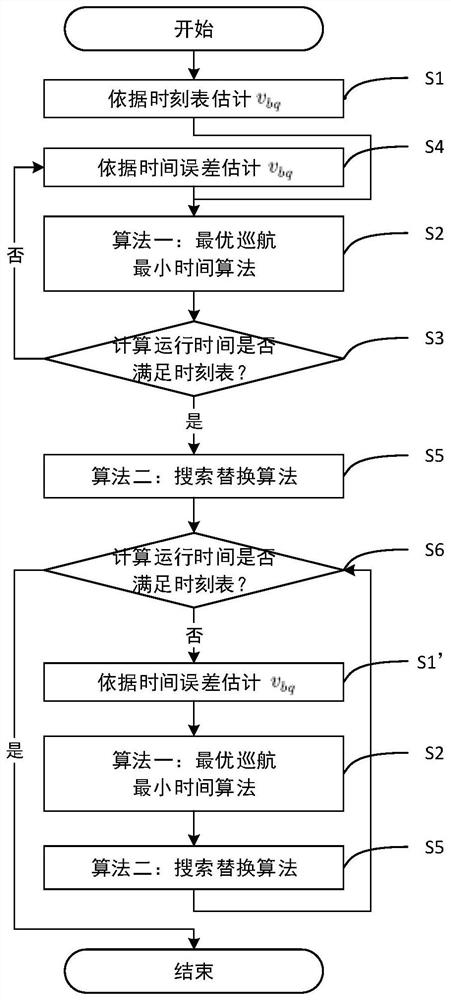
[0135] Such as figure 1 As shown, a traffic energy-saving and safe operation trajectory planning control method includes the following steps:
[0136] S1. Estimating the optimal towing cruising speed according to the preset schedule;
[0137] S2. Using the optimal cruising minimum time algorithm to generate an approximate optimal solution of energy consumption, the approximate optimal solution of energy consumption corresponds to an approximate optimal running trajectory point;
[0138]S3, judging whether the train running time corresponding to the calculation result of step S2 satisfies the timetable, if satisfied, then execute S5, otherwise execute S4;
[0139] S4. According to the time error of the train running time and timetable in S3, iteratively update the optimal traction cruising speed, and then return to execute S2;
[0140] S5. Using the search and replace algorithm to further optimize the approximate optimal solution of energy consumption;
[0141] S6. Judging w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More